A bike that can move freely using a single giant ball has been developed

James Breton, an engineer and YouTuber who makes his own robots and vehicles, has released a movie developing a bike that can move one ball and run 360 degrees freely.
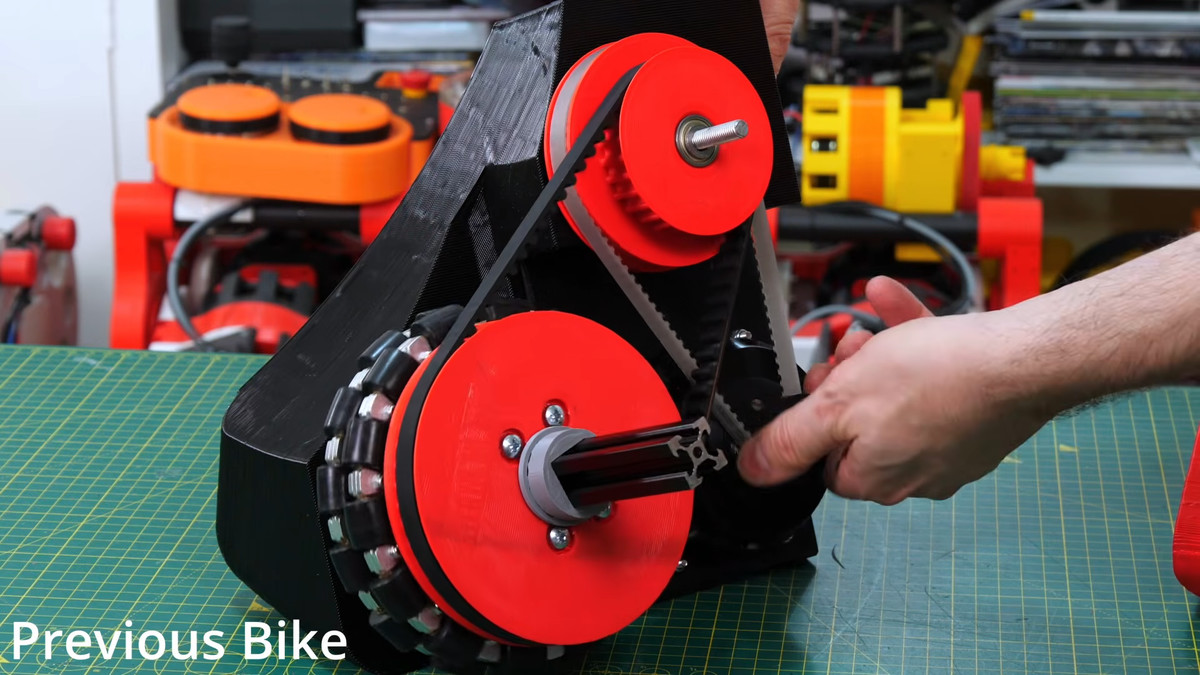
Breton had previously developed a spherical-tired bike, which could move in all directions while maintaining sideways balance like a Segway.

One thing that becomes particularly difficult with a single-ball system is steering. With a two-ball machine, you can turn by rotating the left and right balls in opposite directions, but with a one-ball machine, this method is no longer possible.

In addition, the horizontally oriented omni-wheels used in conventional spherical balancing robots tend to have small rollers that interfere with each other at high speeds, so the orientation and configuration of the wheels must be reviewed.

Steering is also a big issue. With a two-ball machine, you can turn by rotating the left and right balls in opposite directions, but with a one-ball machine, this method doesn't work, so you have to come up with another steering method.

In most conventional spherical balancing robots, the omni-wheel surface faces the ground, which causes the small rollers to become overloaded and interfere with each other at high speeds. In the two-ball robot, the wheel was rotated 90 degrees to orient the surface vertically, improving high-speed response, but the trade-off was that it became more difficult to rotate on the spot. Furthermore, the small rollers in commercially available omni-wheels rotate on brass bushings, and over long periods of use, frictional heat softens the rubber, causing a loss of grip.
So this time, I will be making a new homemade omni wheel with bearings in the small rollers.
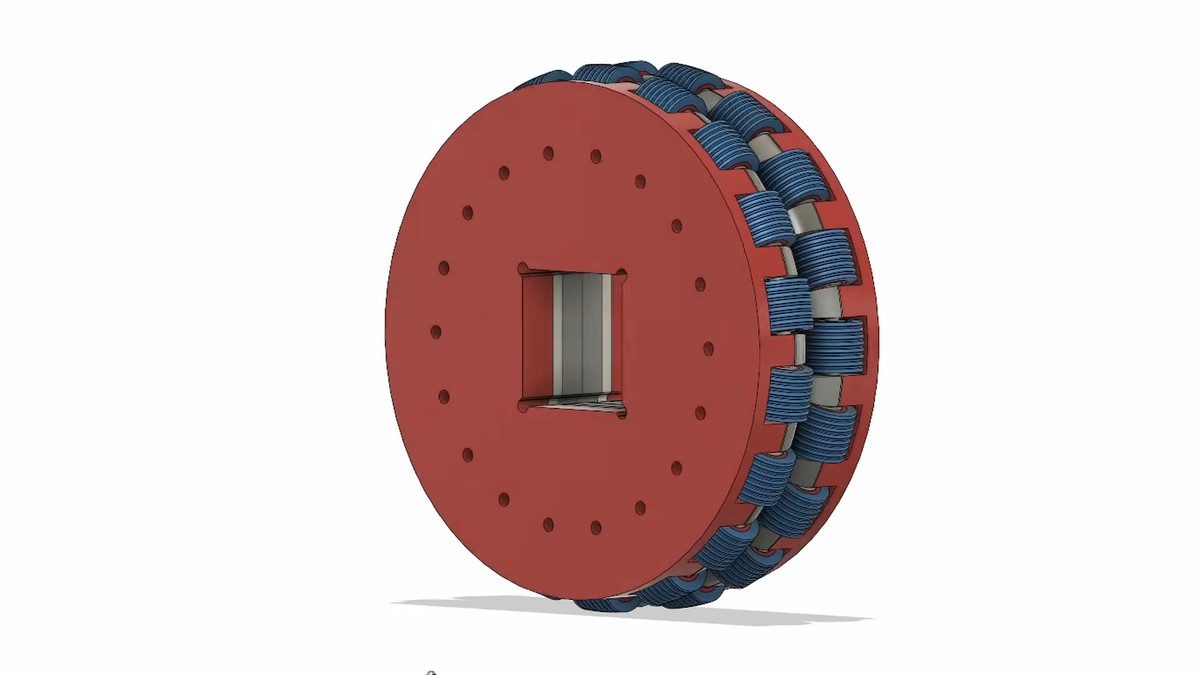
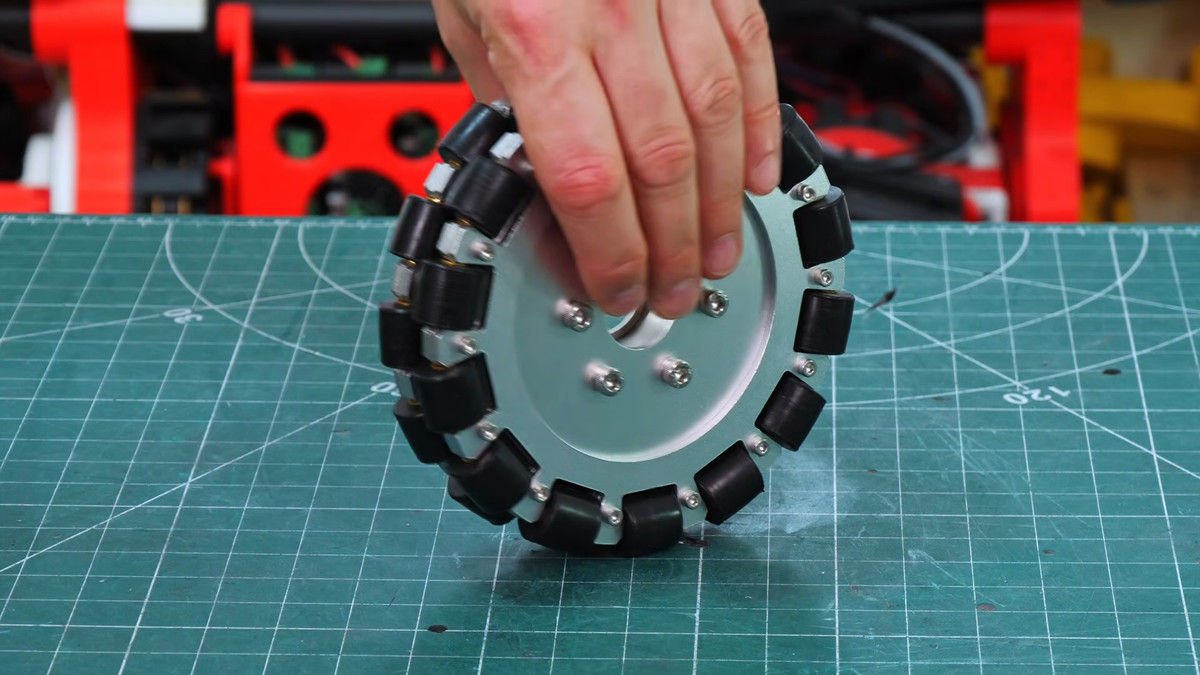
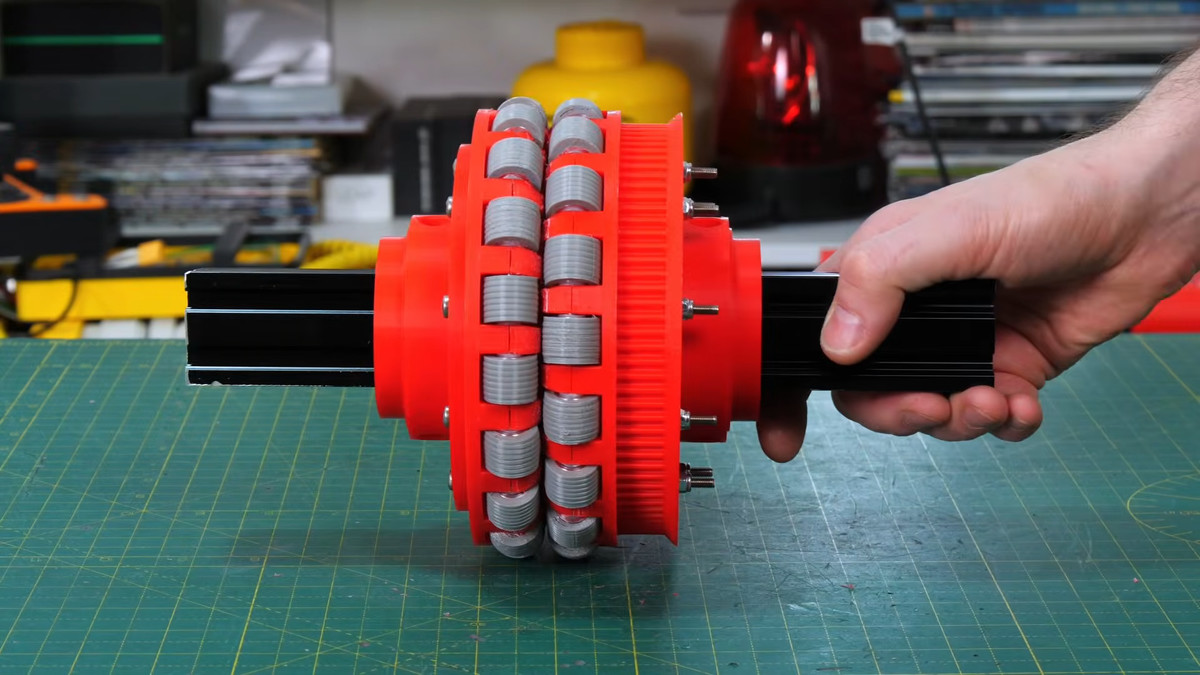
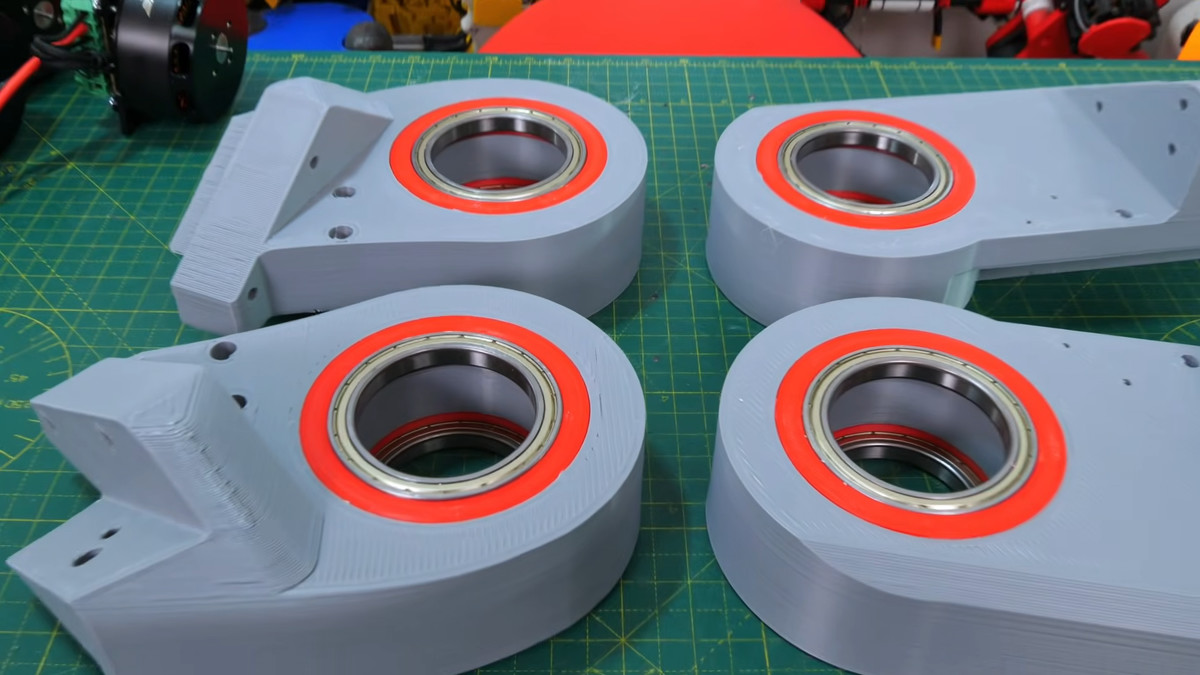
The homemade wheels consist of two rows of 18 small rollers on each large diameter wheel. Each small roller uses a bearing on both ends, making it a very large-scale design with a total of 216 bearings for the three wheels.

The tires for the small rollers are 3D printed from TPU, and the core is custom-made from aluminum. The tire and core have interlocking profile shapes, and the tight fit makes them less likely to slip.
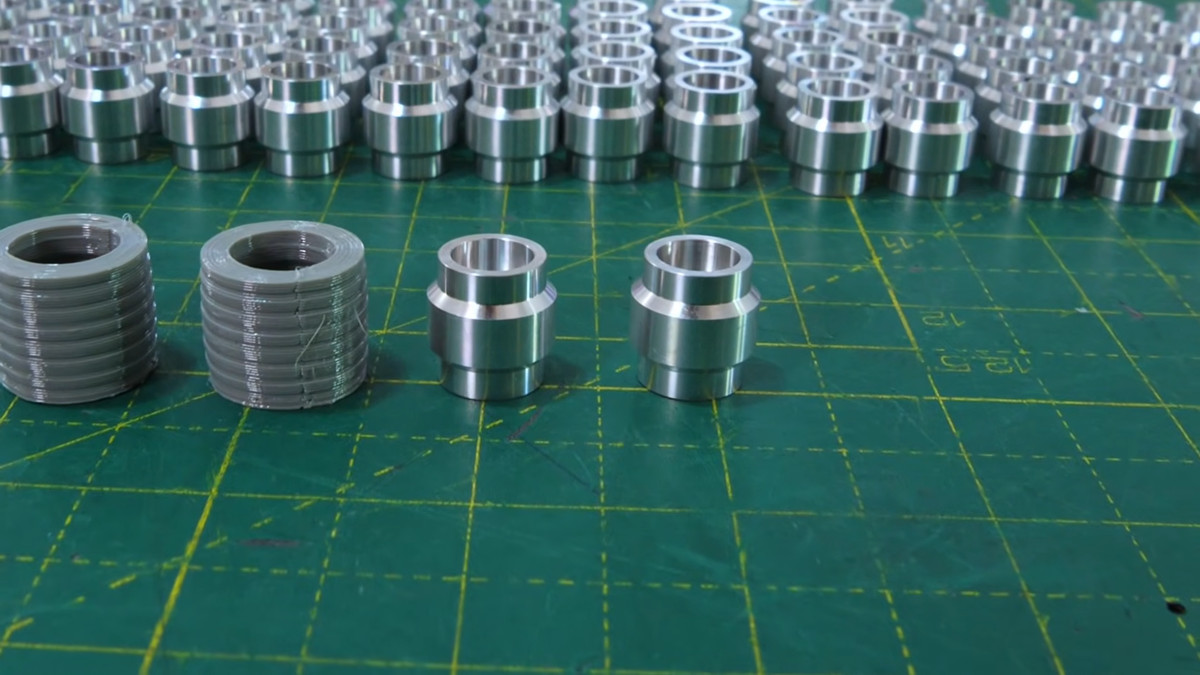
The overall structure is a hybrid structure in which the aluminum core bears the axial load, and the 3D printed parts are mainly responsible for positioning and holding. This is a rational design that uses metal only for the parts that bear heavy loads while keeping processing costs down.
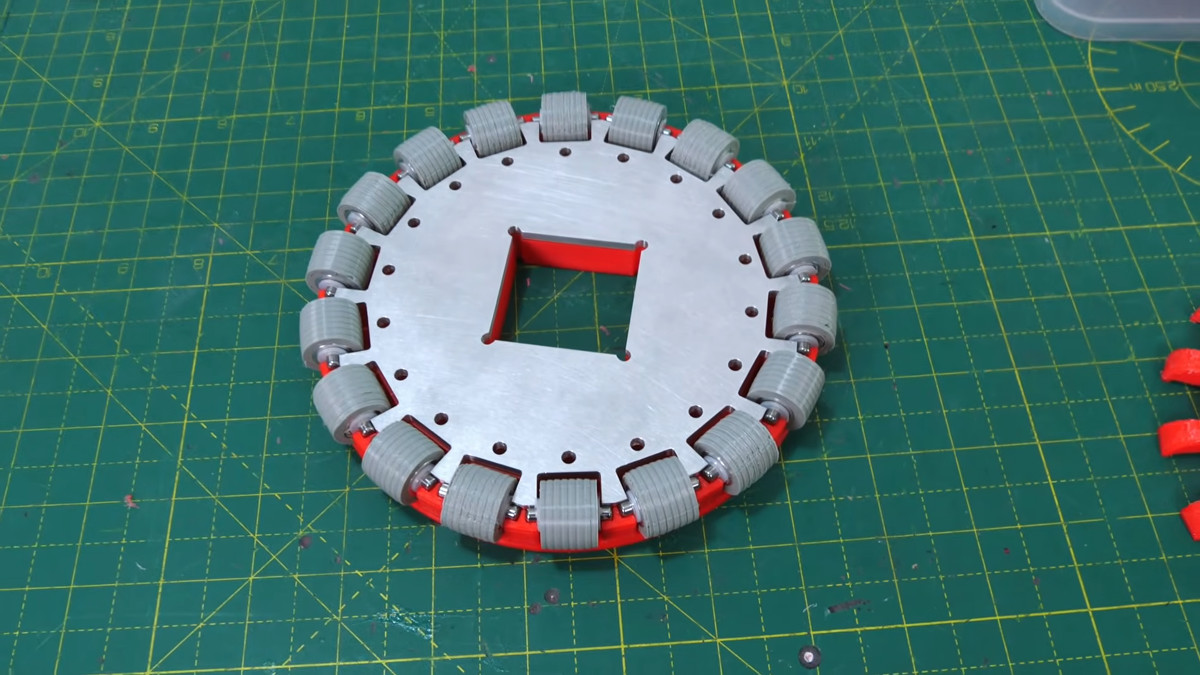
This is what it looks like when assembled.
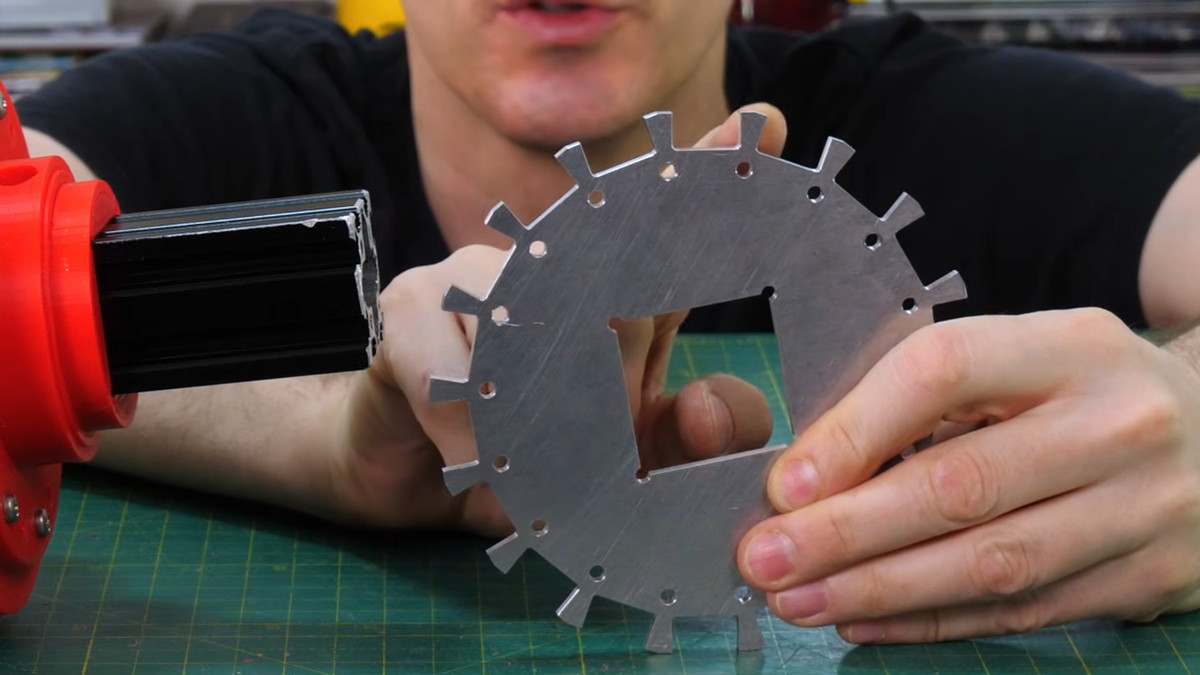
Breton said that it would be impossible to tell until they actually tried it whether the 4mm thick 6000 series aluminum and PLA parts could support the body weight and weight of the vehicle.
In particular, there are concerns that the notched shape unique to omni-wheels may cause stress to be concentrated in the thin-walled areas.
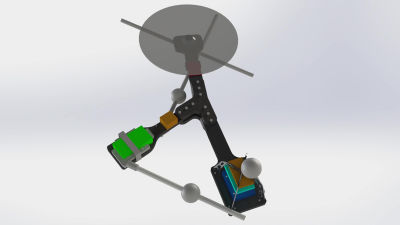
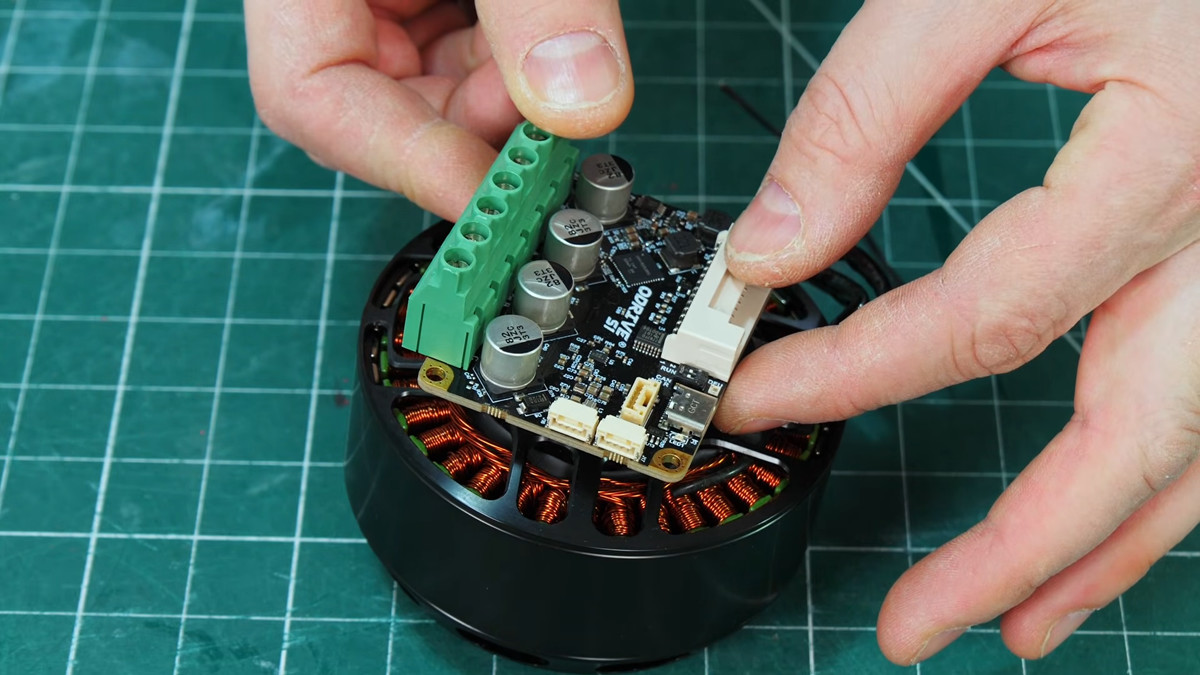
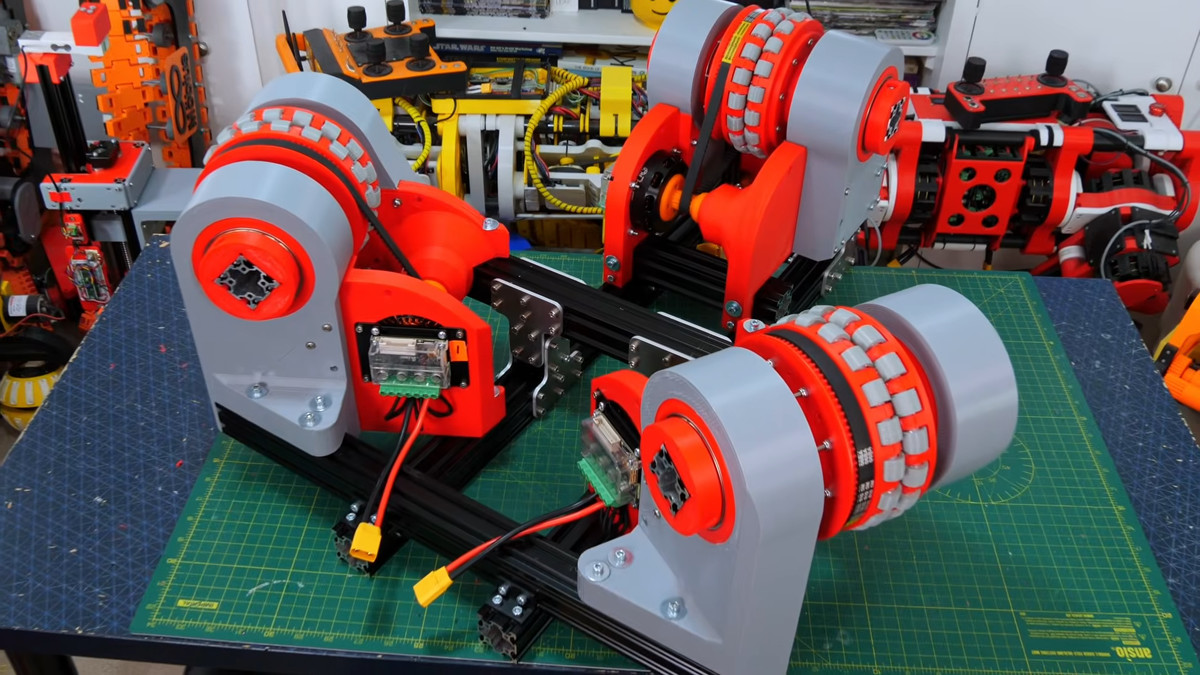
The drive system uses three Odrive brushless motor kits, each rated at a maximum of 2kW. The motor driver, magnet, and encoder are all integrated into one unit, making it easy to assemble as an experimental device.
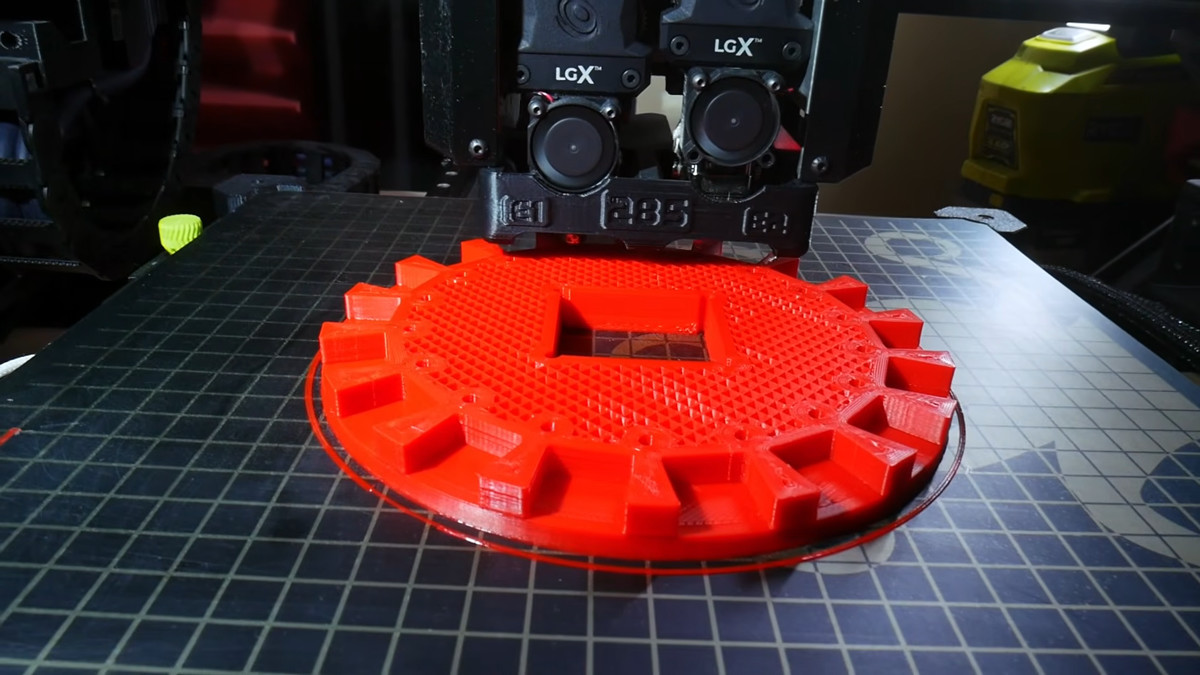
The motor mount and bearing areas were 3D printed thickly using Polymax PLA with a large diameter nozzle.
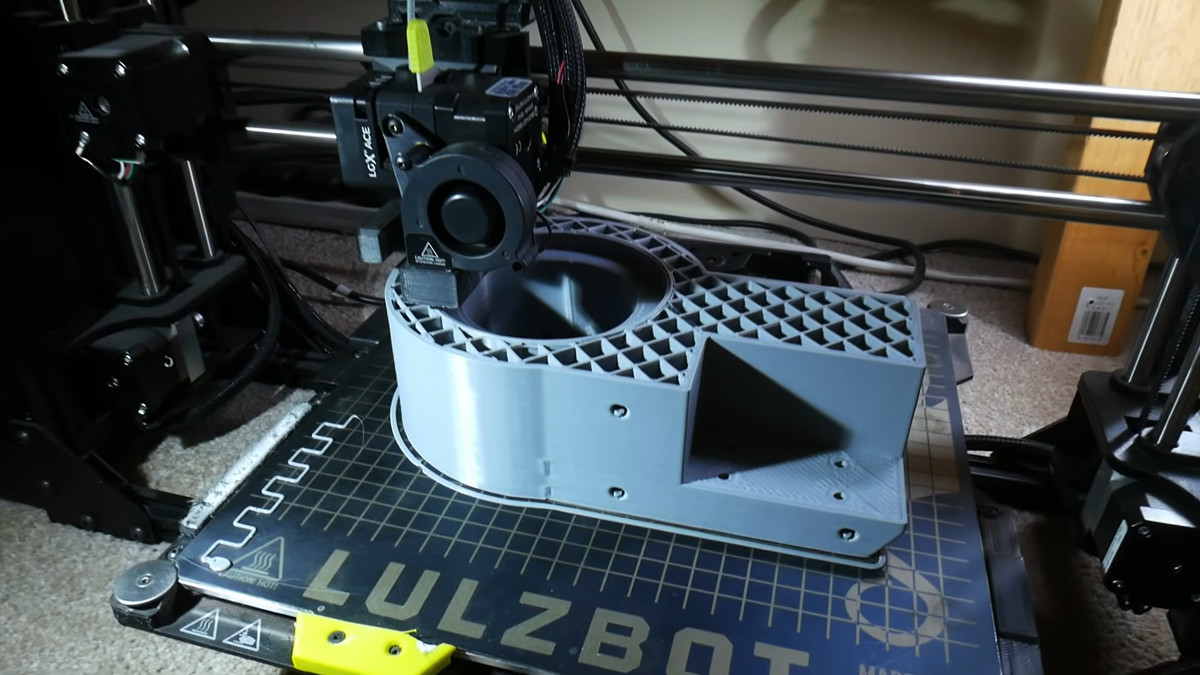
Areas requiring fine tolerances are made into separate parts with thin nozzles, reducing the effort and adjustment costs of reprinting.
Self-tapping screws are driven into the fixing parts of the pulleys and shafts in the stacking direction to prevent cracking of the 3D printed parts.
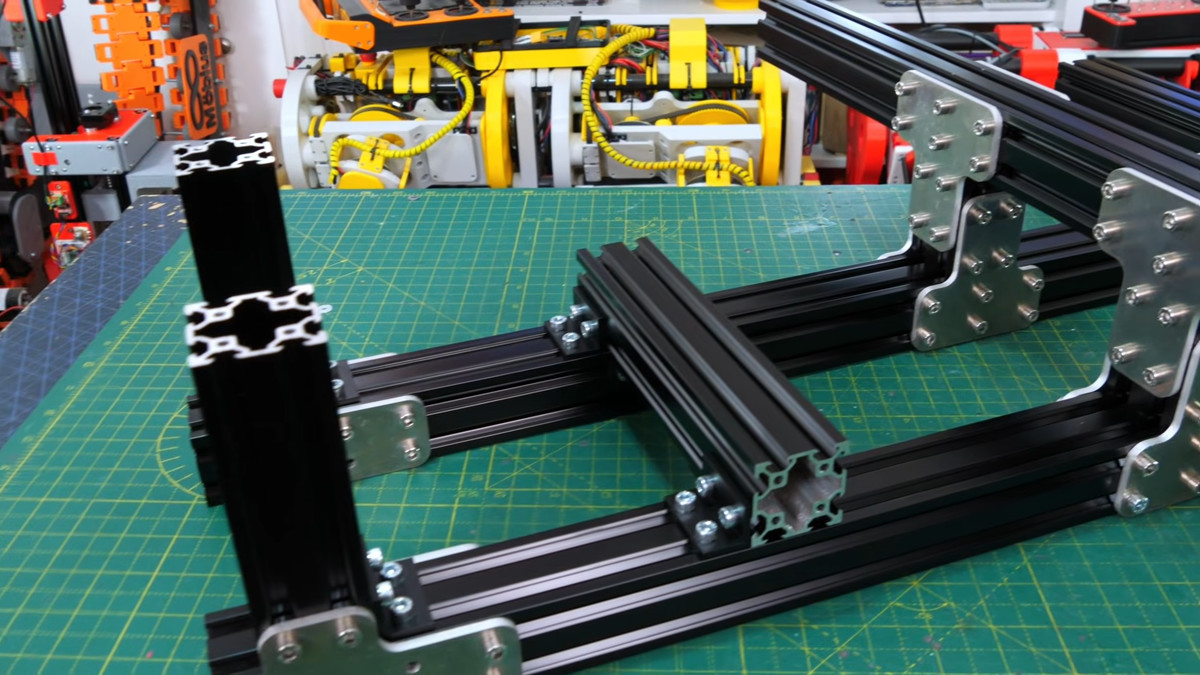
The chassis is a box-shaped 4040 aluminum frame assembled with T-nuts and brackets. This structure is easier to manufacture than a welded steel frame and provides sufficient rigidity, making it the ideal configuration for a prototype.
When the three wheels are fixed to the chassis it looks like this.
After assembly, check the rotational relationship of the three wheels by turning the ball by hand.

When considering riding posture, it was determined that a forward-leaning sports bike-style layout would be promising, as it would make it easier to dismount safely and keep the center of gravity closer to the center.

Pedals are also installed at the rear of the chassis to serve as foot rests.

The power supply is six 6S LiPo batteries.

These LiPos are connected in series to generate approximately 50V and then paralleled to form a high-power system. The low-voltage system is separated by a separate power supply and regulator, and is equipped with a Teensy 4.1, IMU, and CAN transceiver.
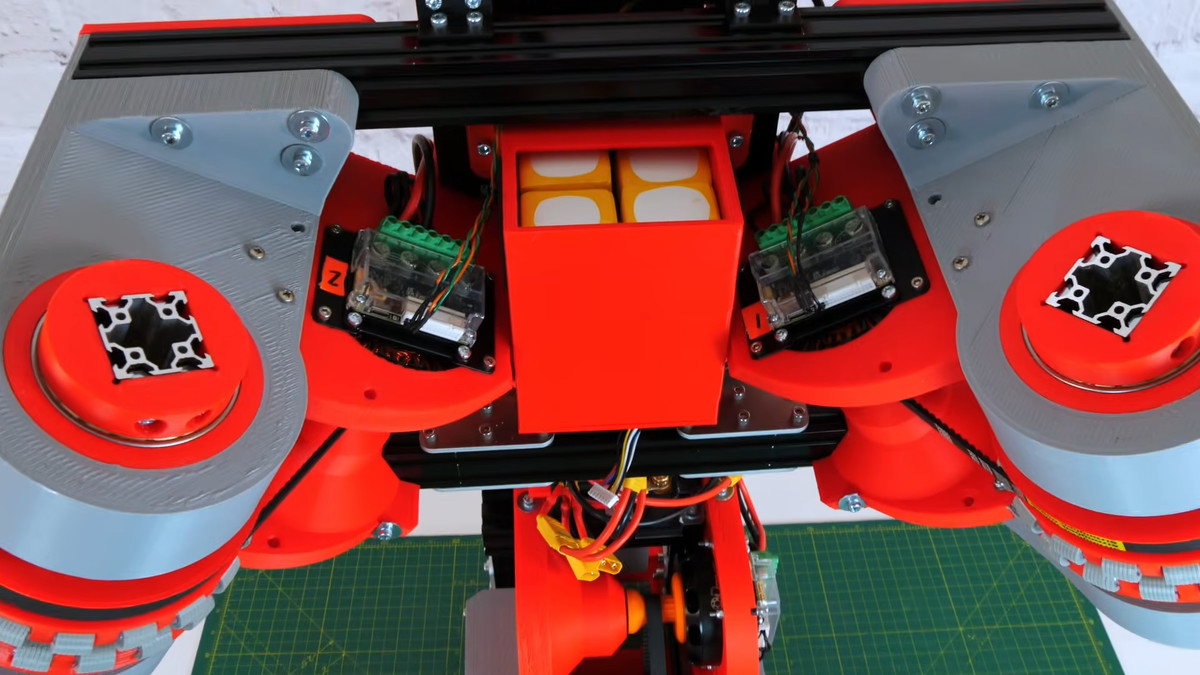
Emergency stop and ignition buttons.

In addition, a conductive spray is applied to the inside of the case to prevent static electricity.

The control algorithm is PID, and in this case it stabilizes two axes simultaneously: roll and pitch.

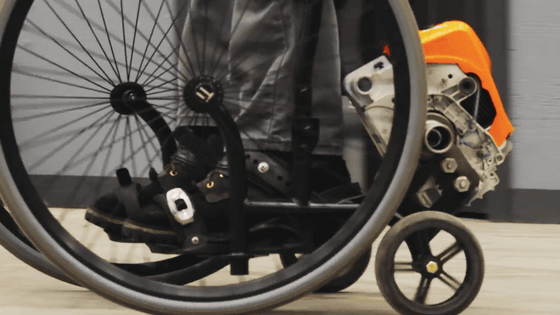
During the initial test flight, the aircraft was more stable than expected, supporting the rider's weight and showing promise for forward, backward, and side-to-side movement. However, there are still no handlebars or footpegs, so operability is still insufficient, but this is the stage where we can get a sense that it is 'likely to be viable.'

Later, during the test run in the gymnasium, Hall sensor type twist grips were added to the left and right handles, allowing for the adjustment of the target angle set points for forward/backward and left/right. The balance angle for forward/backward can be changed within a range of approximately ±10 degrees, and is expected to be used for acceleration/deceleration and braking assistance.

As you move forward, change the lateral set point and bank the aircraft to turn. The key is to get the feeling that you are 'leaning and turning.'

However, it seems that fine control is still difficult because it requires skill in shifting your weight. Breton commented, 'Although the speed is quite high, there is no sense of reaching the maximum speed limit, and it is quite scary.'

Furthermore, the bike suddenly stopped and fell over.

Breton realized that because the ball's

However, there was still a problem with the machine suddenly pausing midway through, and although Breton took careful shielding measures, he suspected based on past experience that the cause was 'charging caused by the combination of large plastic balls and friction.'

Related Posts: