




歩いたり踊ったり動きを自在に操れる「ロボダンボー」を組み立ててみました
漫画「よつばと!」に登場する「ダンボー」をロボット化し、全身に11個のサーボモーターを搭載して「歩く」「踊る」など様々な表現が可能でコントローラー「VS-CS3」を使って無線で操縦できるというキット「ロボダンボー」を実際に組み立てて動かしてみることにしました。
ロボダンボー(Danboard the Robot) | ヴイストン株式会社
http://www.vstone.co.jp/products/danboard/
◆フォトレビュー
こちらがロボダンボー本体の箱。
スライドして中の箱を開けてみます。
中箱を開けるとダンボーの外装部分のダンボールと……
ユーザー登録書が入っています。
その下には白い箱が2つ。

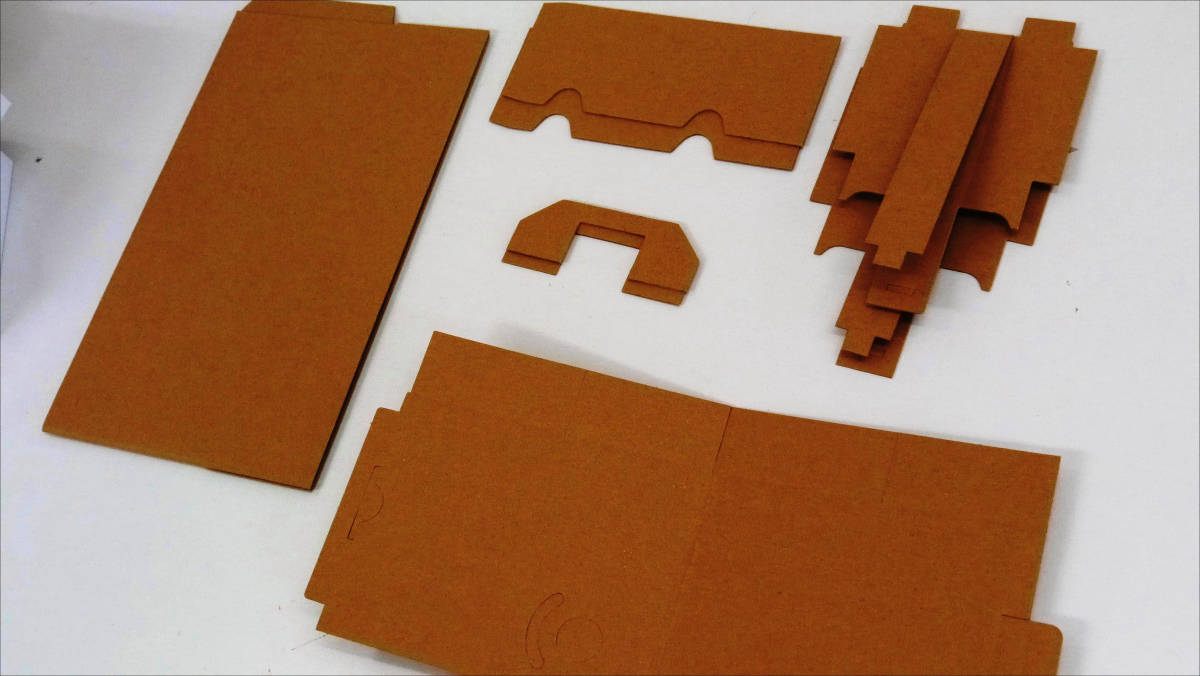
外装のダンボールを広げるとこんな感じ。思ったほどパーツ数は多くありません。
続いて青いシールのついた箱を開封。

中身を並べるとこんな感じ。

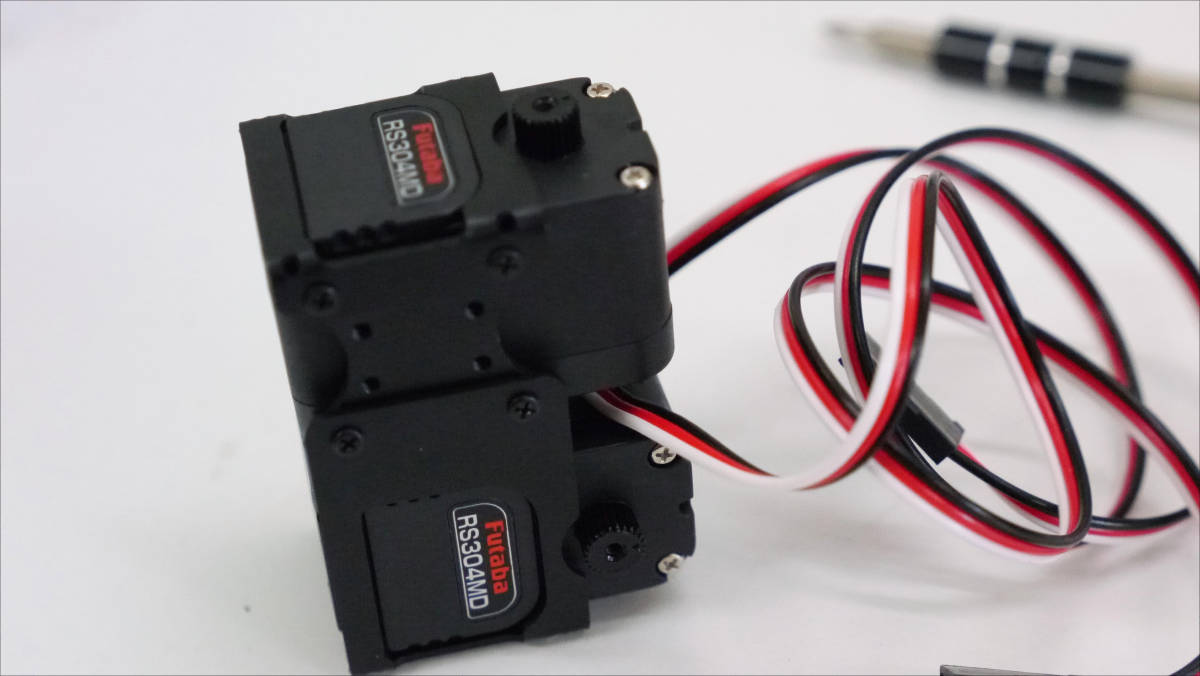
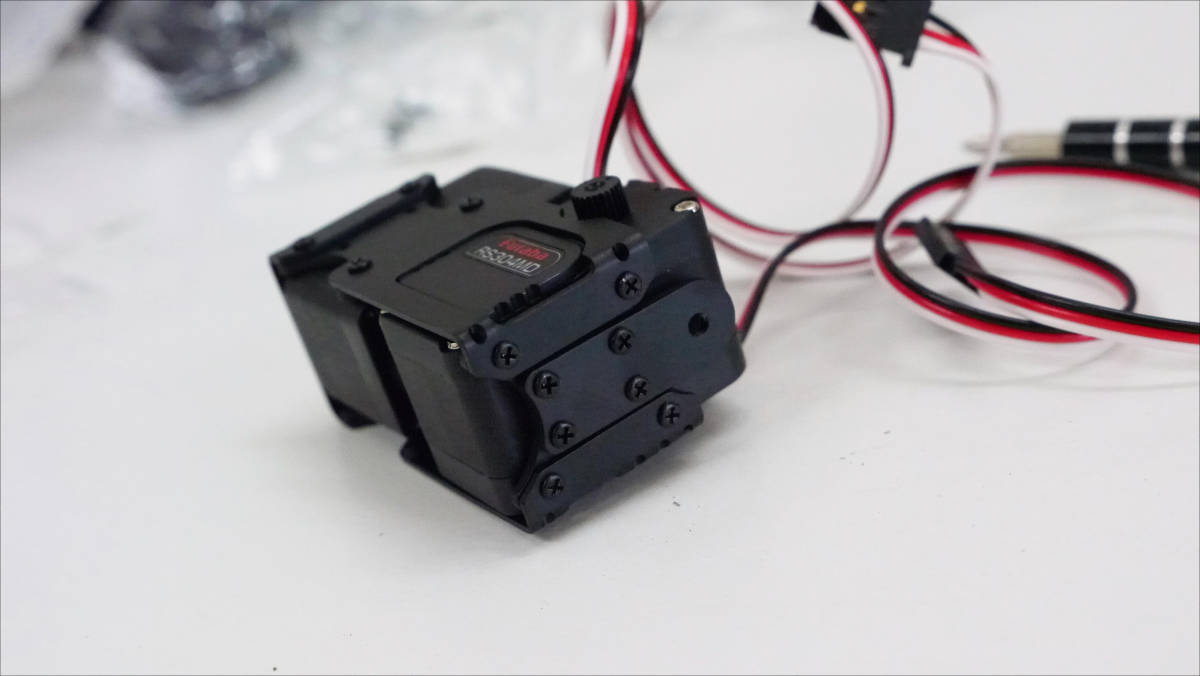
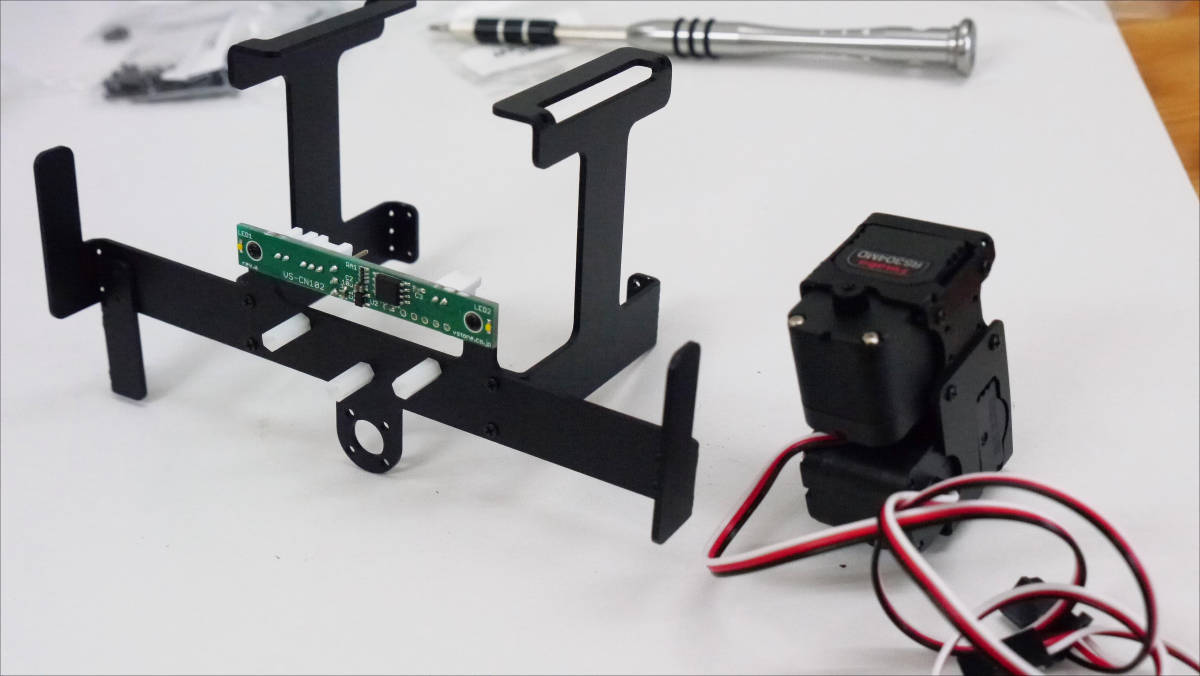
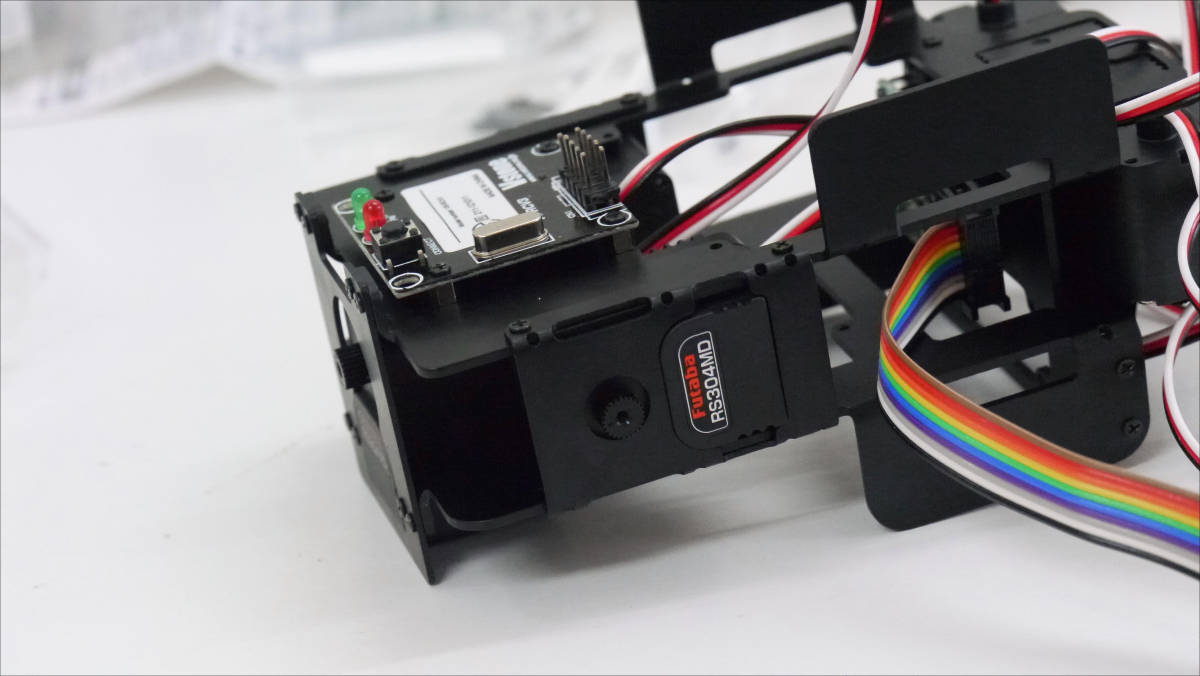
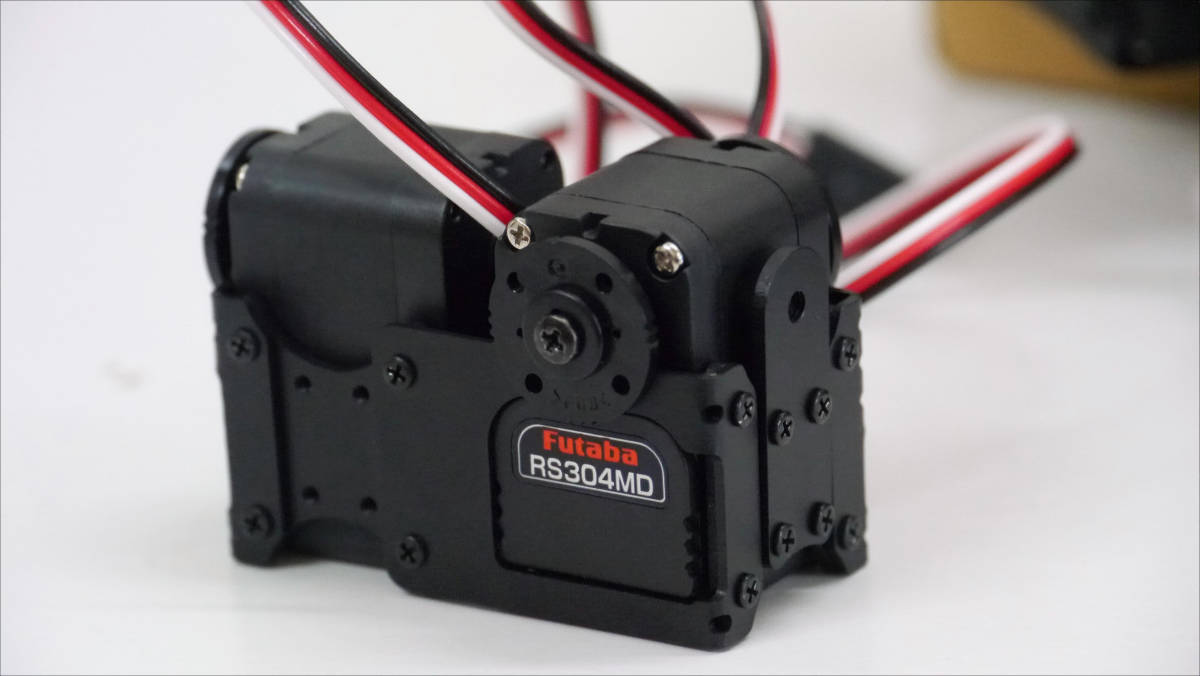
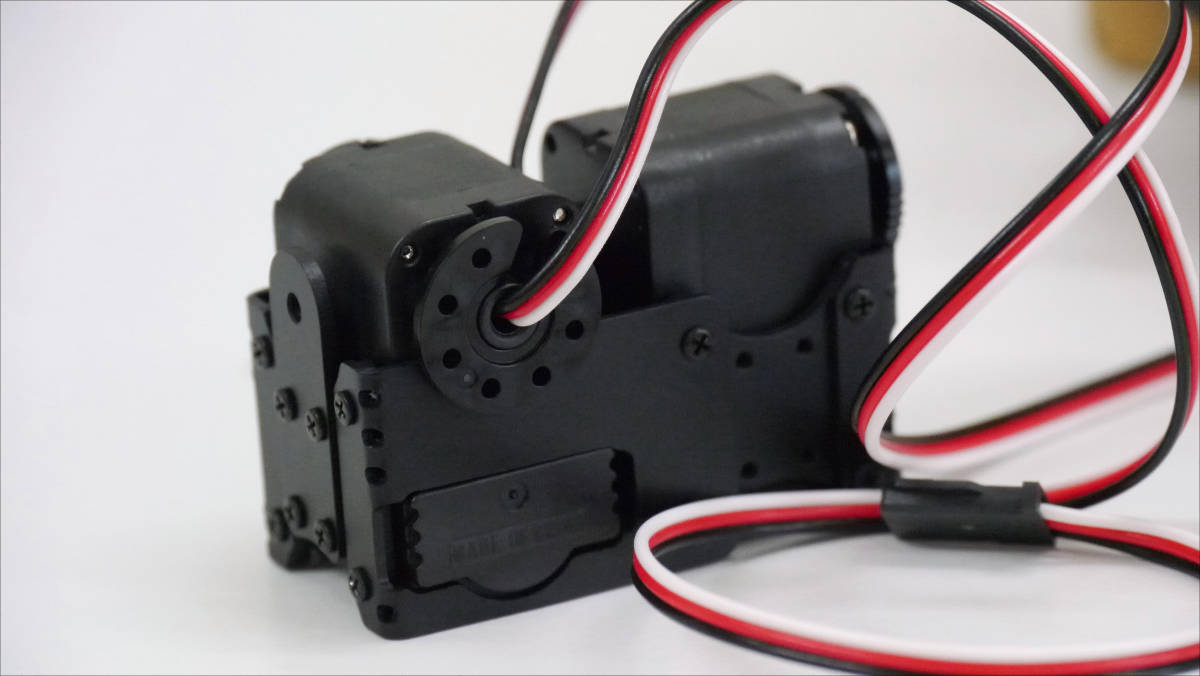
サーボは双葉製「RS304MD」です。

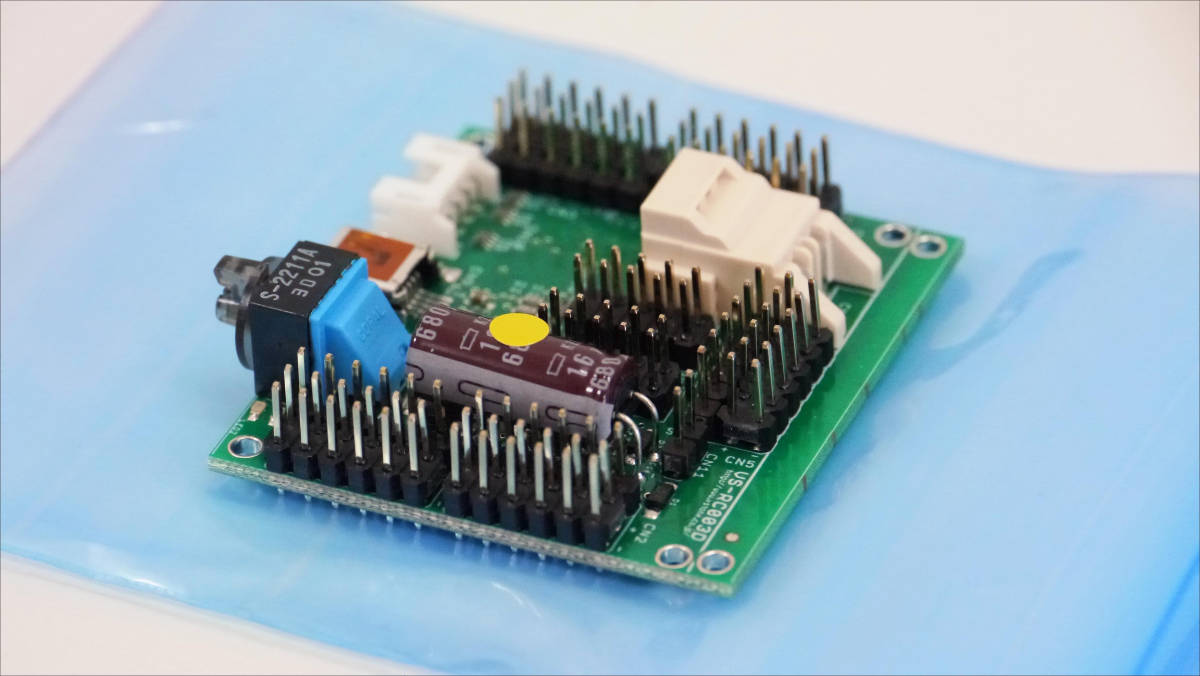
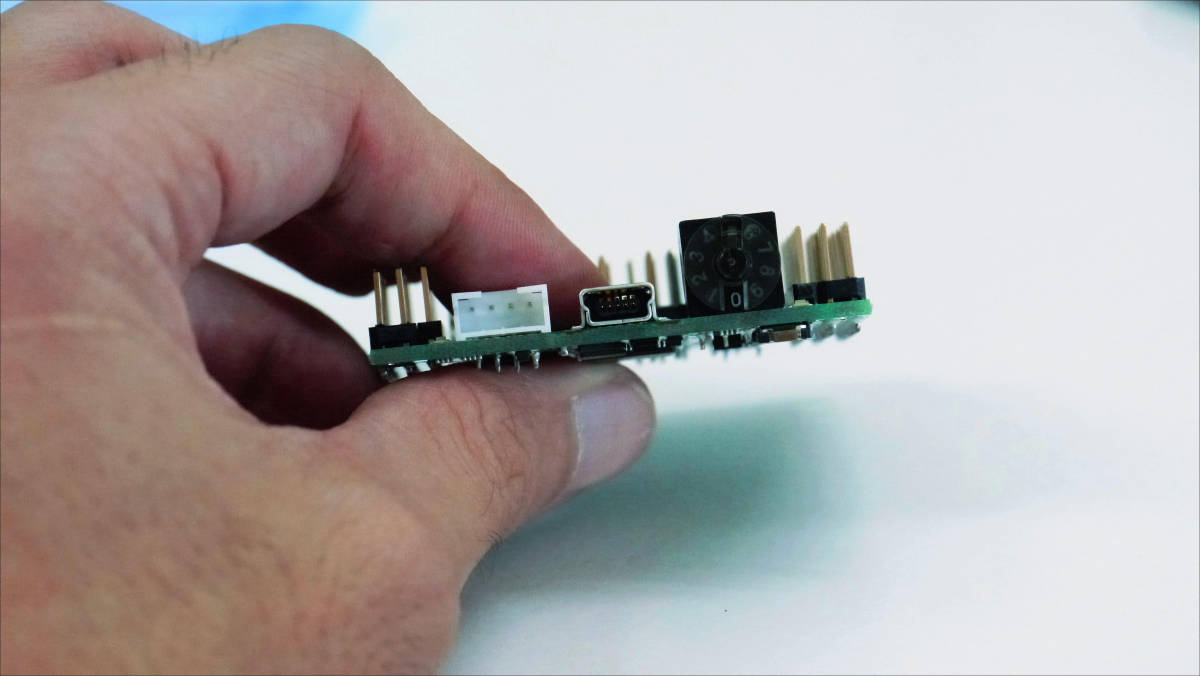
こちらがロボダンボーの心臓部にあたるCPUボード。
こちらは説明書とロボダンボーとPCを接続するUSBケーブル。組立説明書はDVDに収録されています。

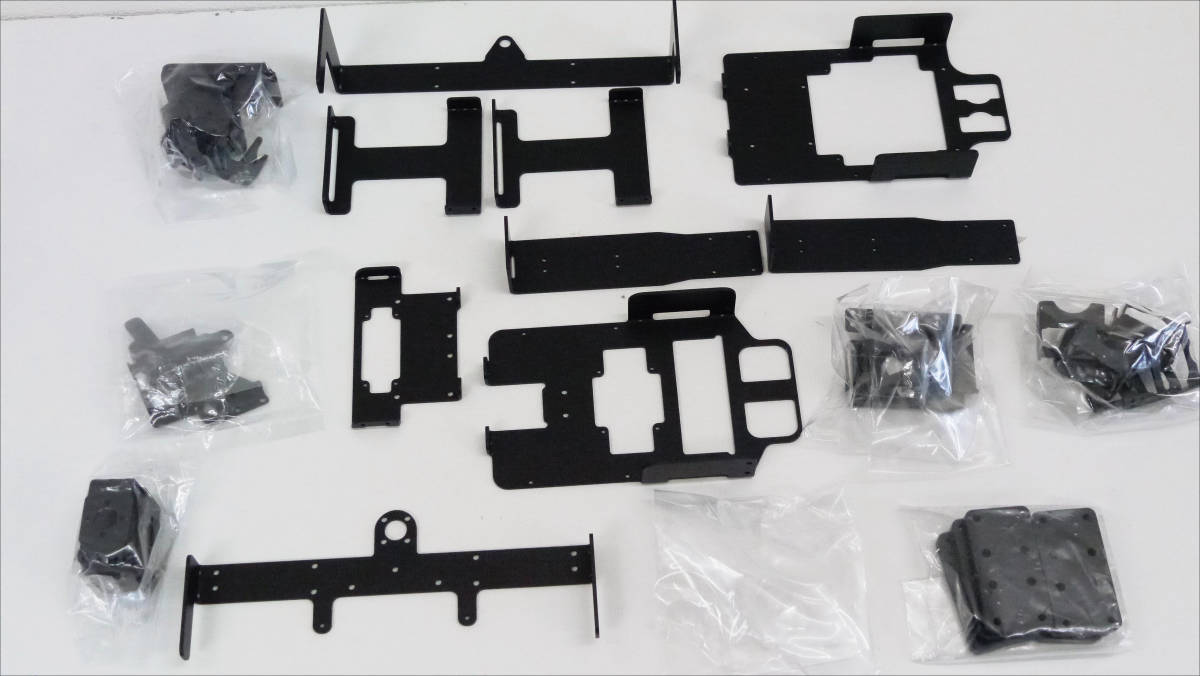
もう一つの白い箱を開封。

金属パーツがぎっしり詰まっています。

全部取り出すとこんな感じ。
こちらはオプション品のジャイロ/加速度センサー「VS-IX001」。

こちらもオプション品の無線コントローラ「VS-C3」。

箱を開けてみると……

どこかで見かけた形のコントローラーと……

基板が入っています。

◆組立て
DVDをPCにセットして、ロボダンボー取扱説明書_ver1.00.pdfファイルをコピーし、PCに保存してから説明書ファイルを開きます。

まずはサーボ11個すべてのタッピングネジとサーボホーンを取り外して保管しておきます。サーボホーンとネジはあとで使用するのでなくさないよう注意。

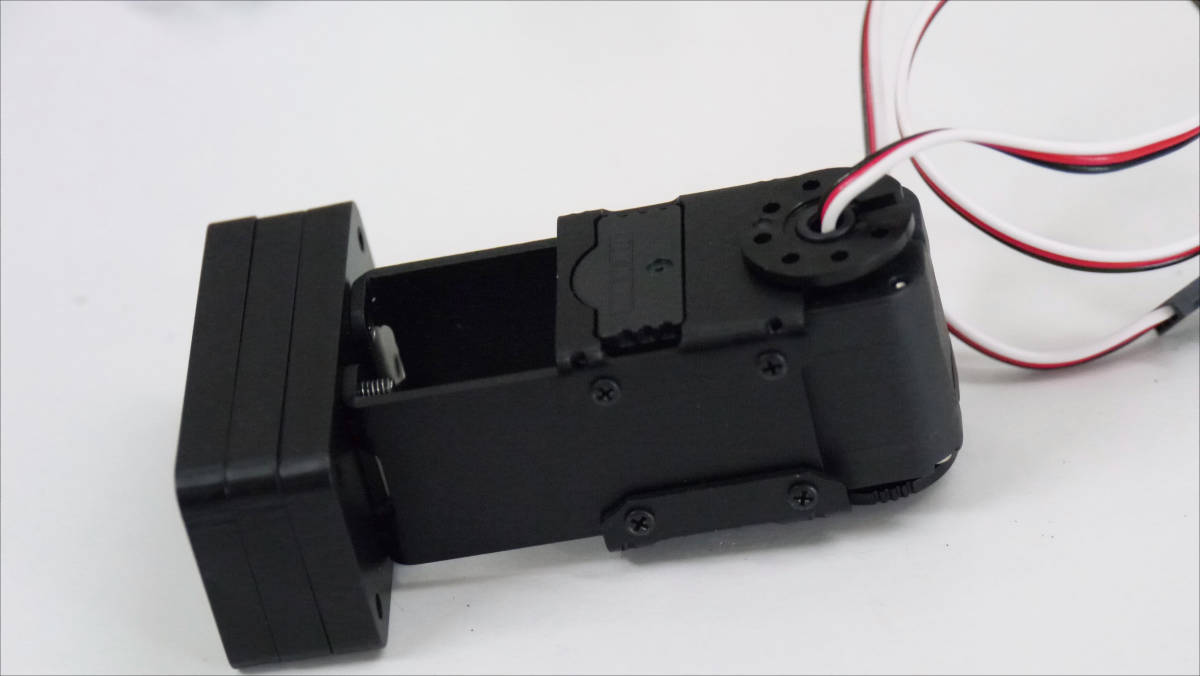
まずはロボダンボーの腕から組み立てていきます。こちらはサーボホルダー。

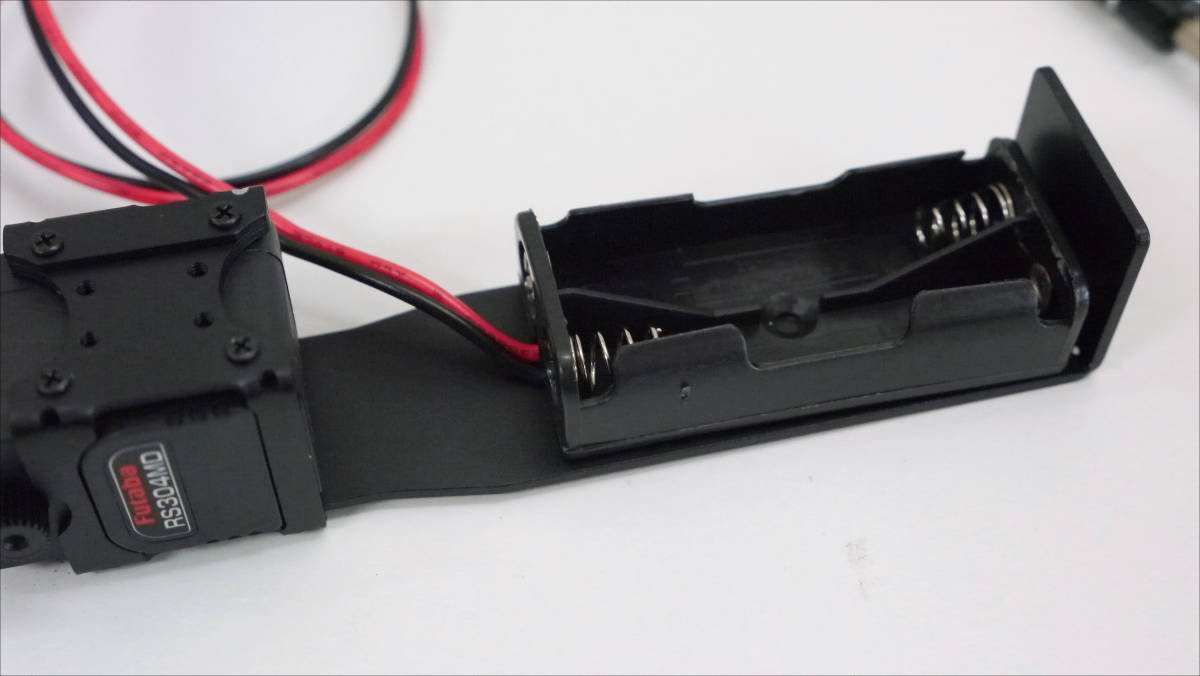
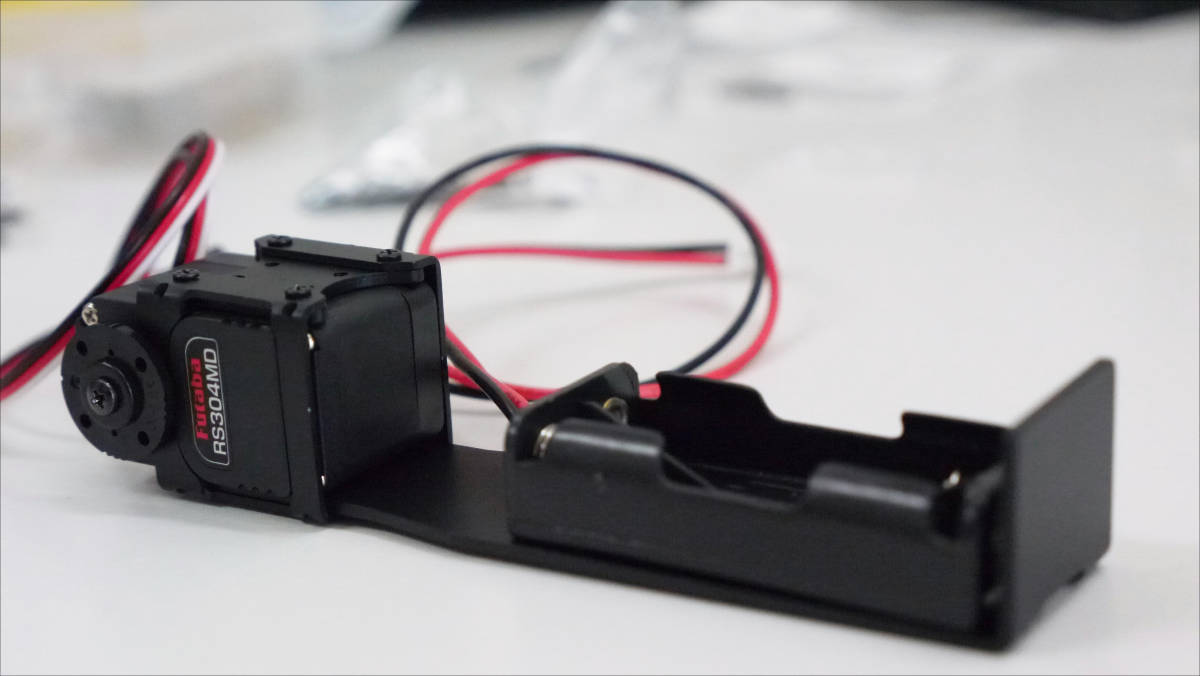
腕にサーボを装着します。


電池ホルダーも装着。どうやらロボダンボーは両腕にバッテリーを装備するようです。
サーボに先ほど外したサーボホーンを装着。サーボの切り欠きと軸の○印を合わせて装着するのが大切なポイント。

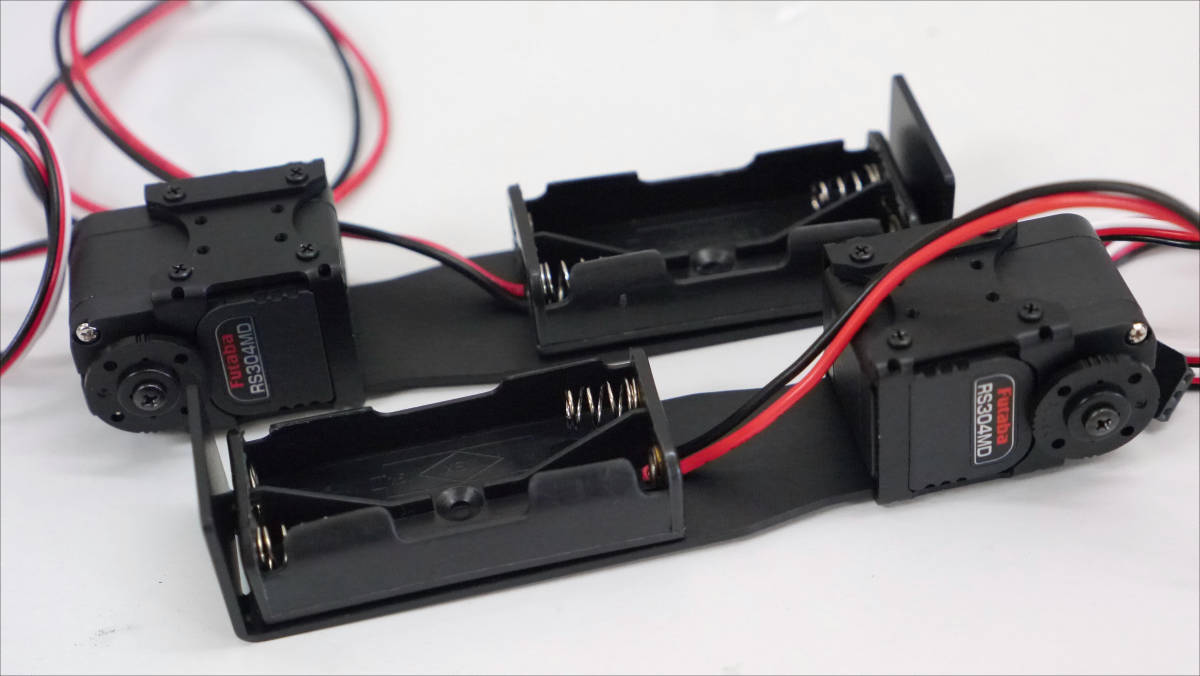
両腕用に2本作ります。
続いてロボダンボーの脚を作成していきます。

サーボホルダーにサーボを装着。

脚の底には3枚のウェイト。このおもりでロボダンボーの安定性は確保されるようです。
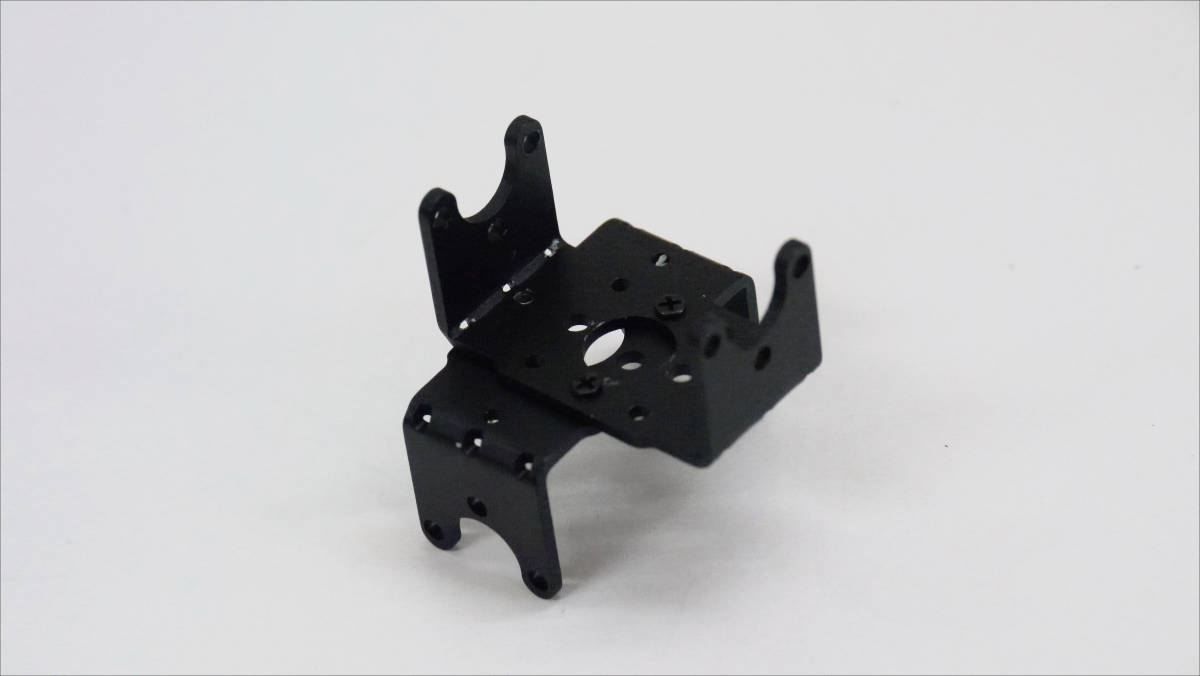
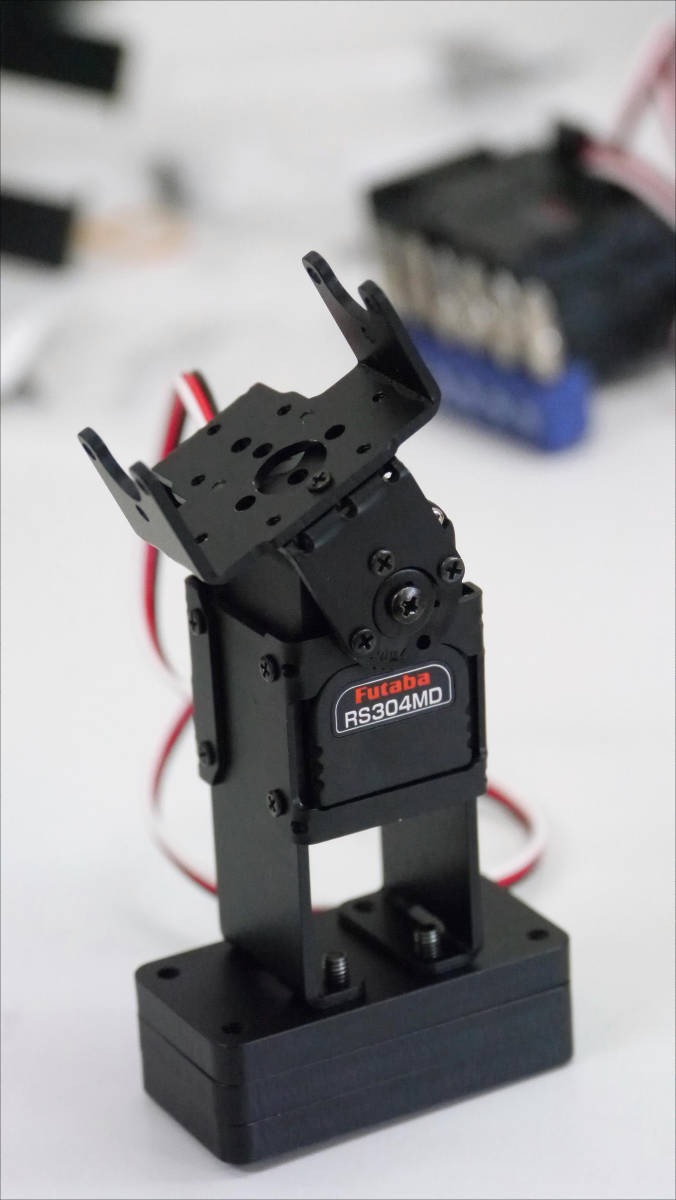
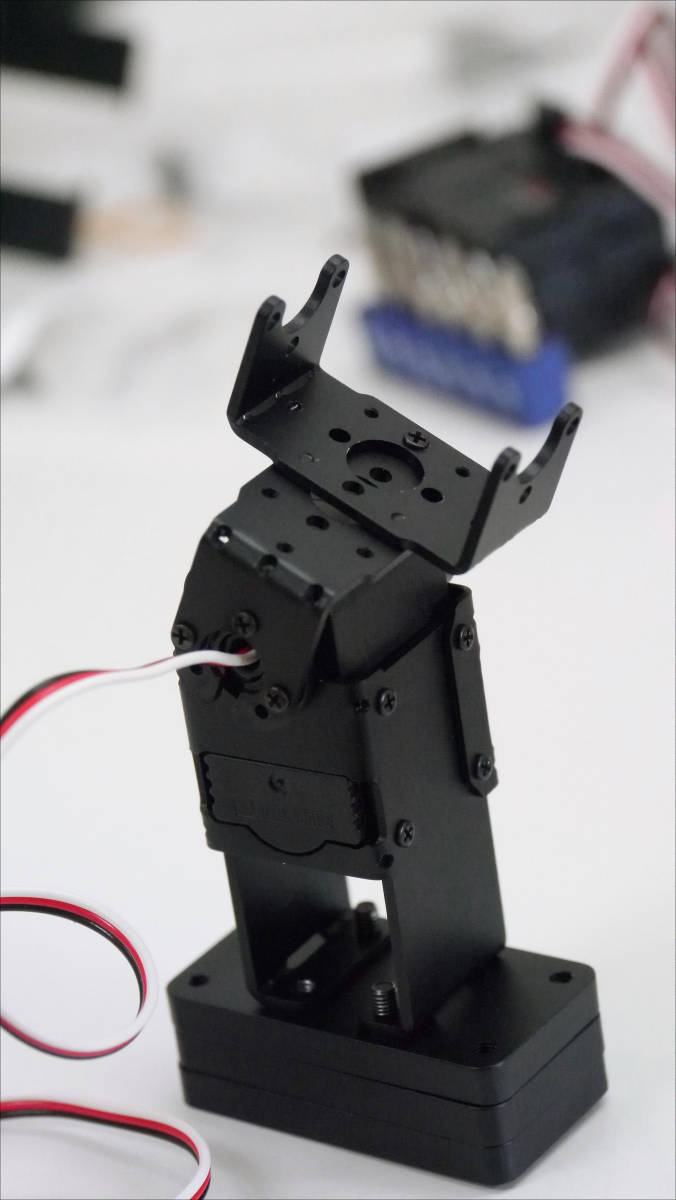
お次はロボダンボーの首部分。こちらの金属パーツに……

サーボを装着。

向きを変えて二つ目も装着。
裏からはステーで支えます。
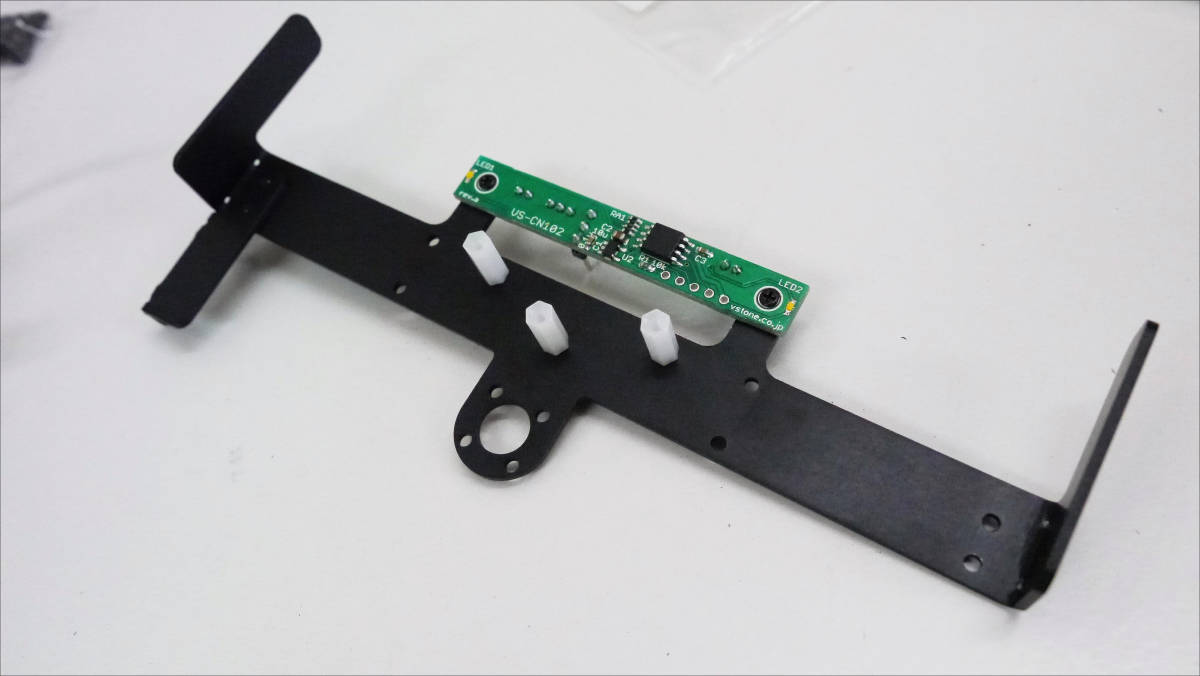
こちらはダンボーの頭部分。LED・電源基板と白いスペーサーを装着します。スペーサーはM2-3mのネジで固定しますが、ネジがかなり短いのでドライバーを使わずスペーサーを手でまわして固定する方が作業は楽です。
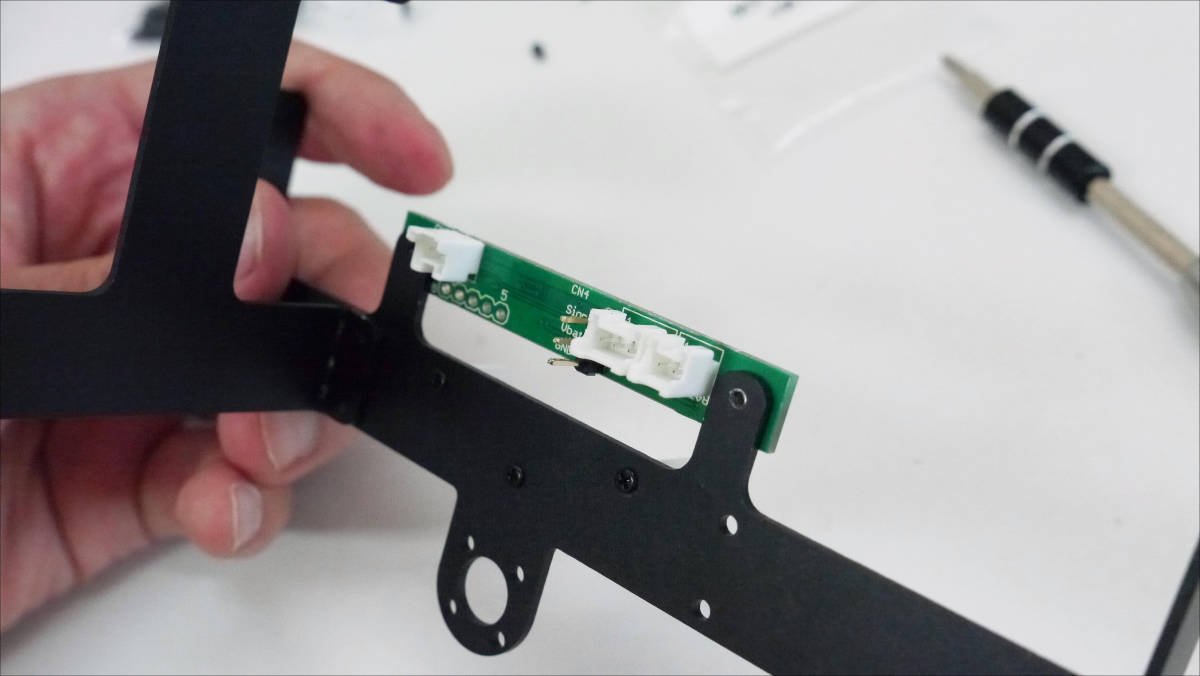
基板裏には各種コネクター。
ステーを装着し……

これで頭部分と首部分が完成。これがロボダンボーの顔になるとは想像できません……
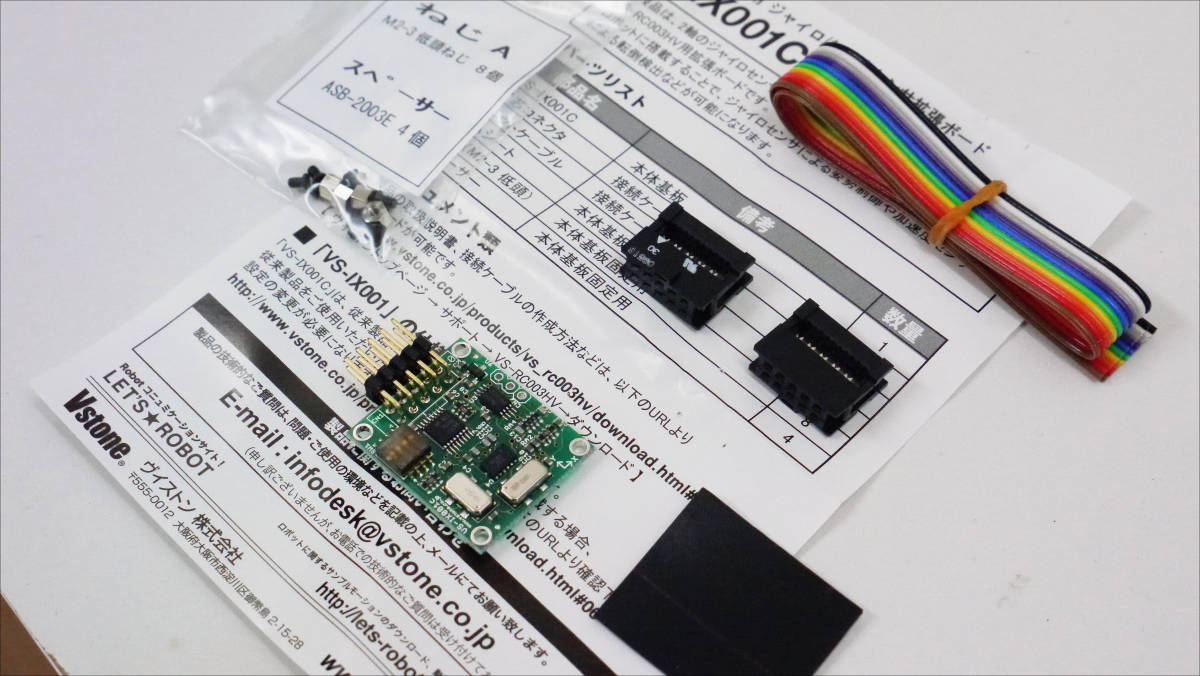
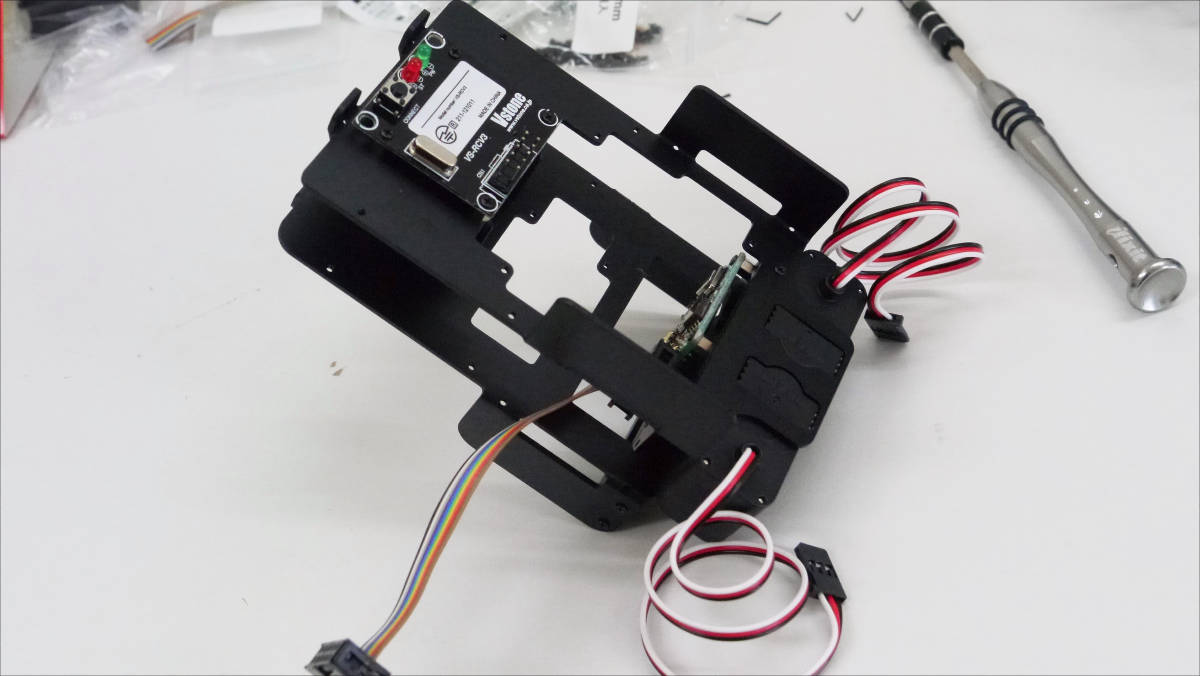
続いて胴体部分を作ります。まずはオプションのジャイロ/加速度センサーを組み込みます。

パッケージを開封すると、VS-IX100メインボード、10芯フラットケーブル、10芯コネクタ、絶縁シート、ネジが入っています。
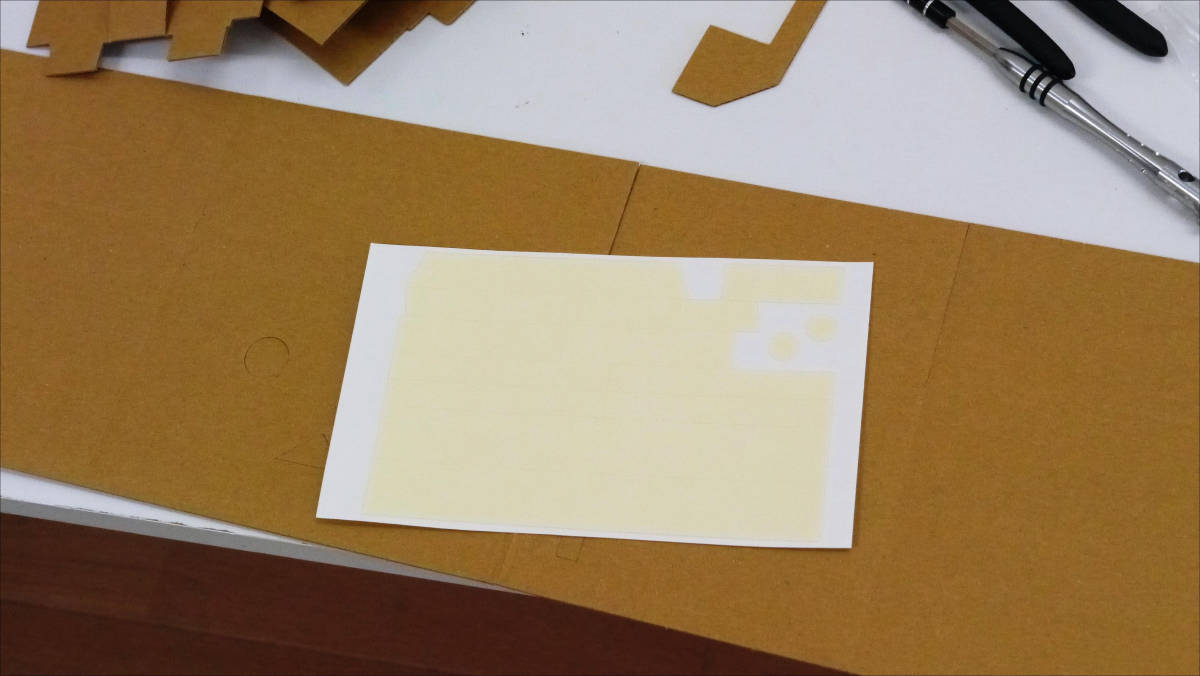
絶縁シートの4隅をハサミでカットして……
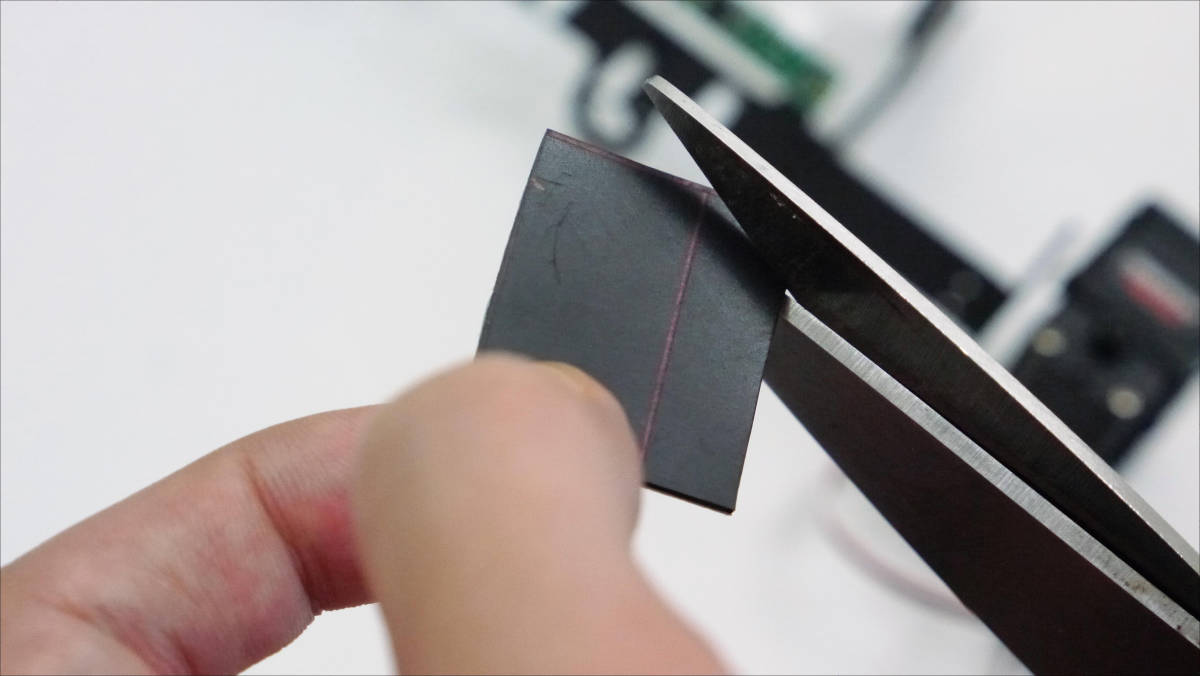
メインボード裏に貼り付けます。
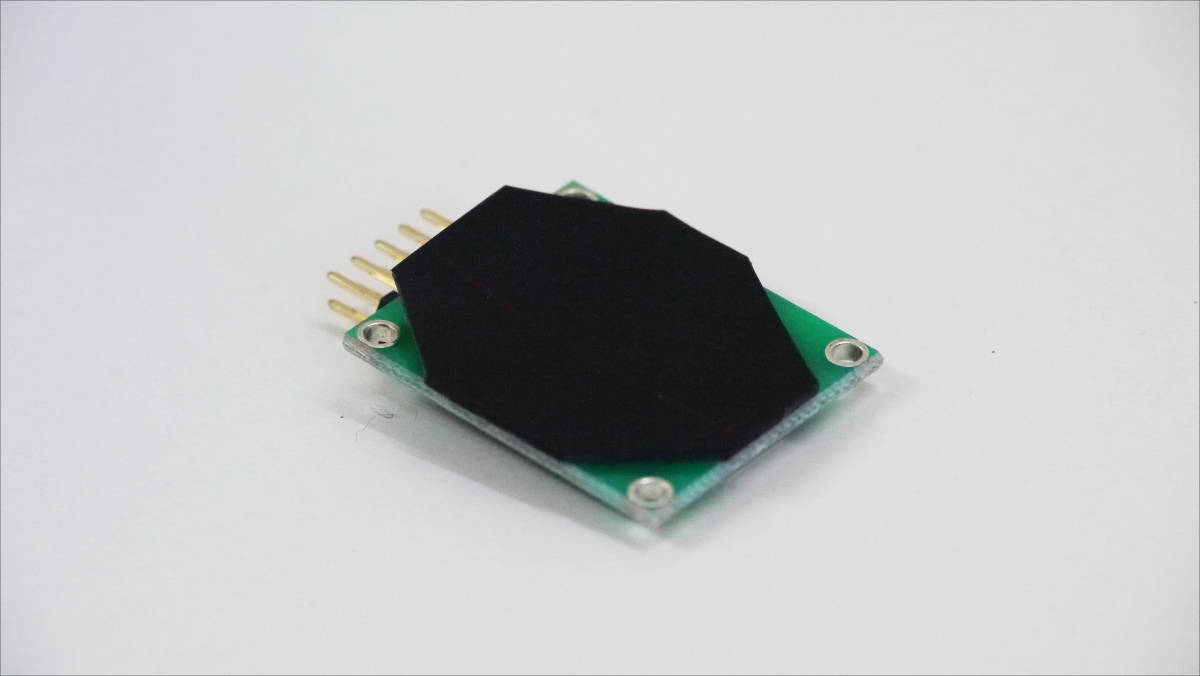
絶縁処理が済んだらジャイロ/加速度センサーをステーに固定します。

ここで10芯フラットケーブルにコネクターを圧着します。ケーブルを説明書通り100mmでカットし……
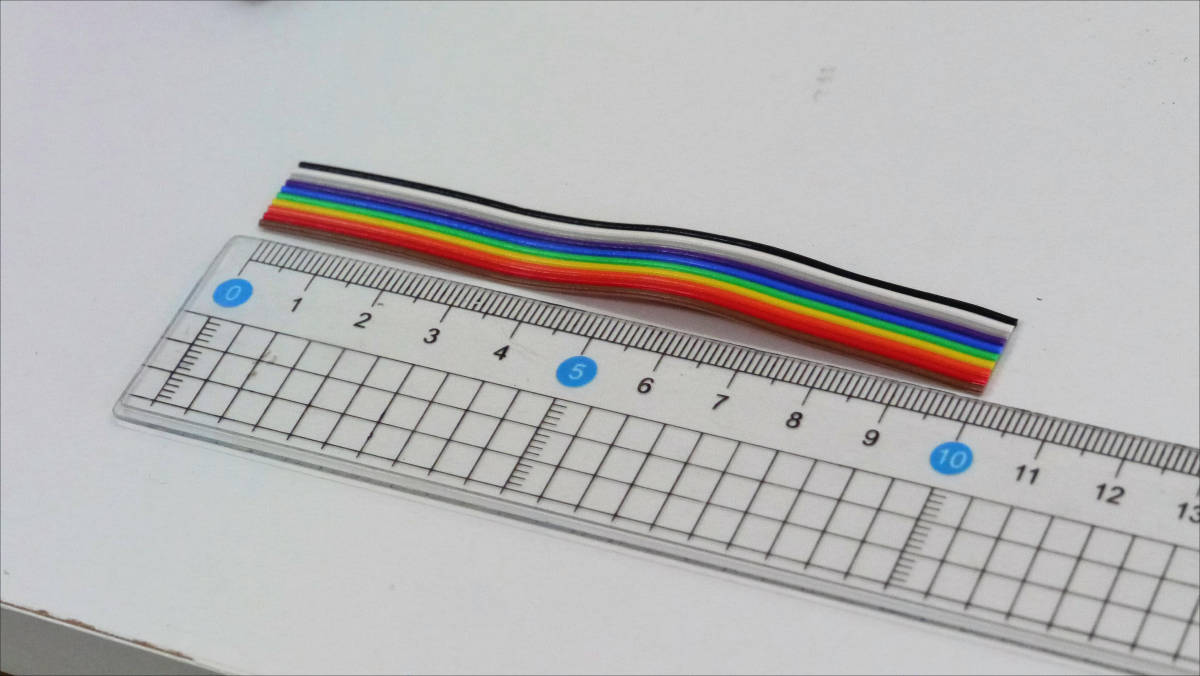
圧着完了。
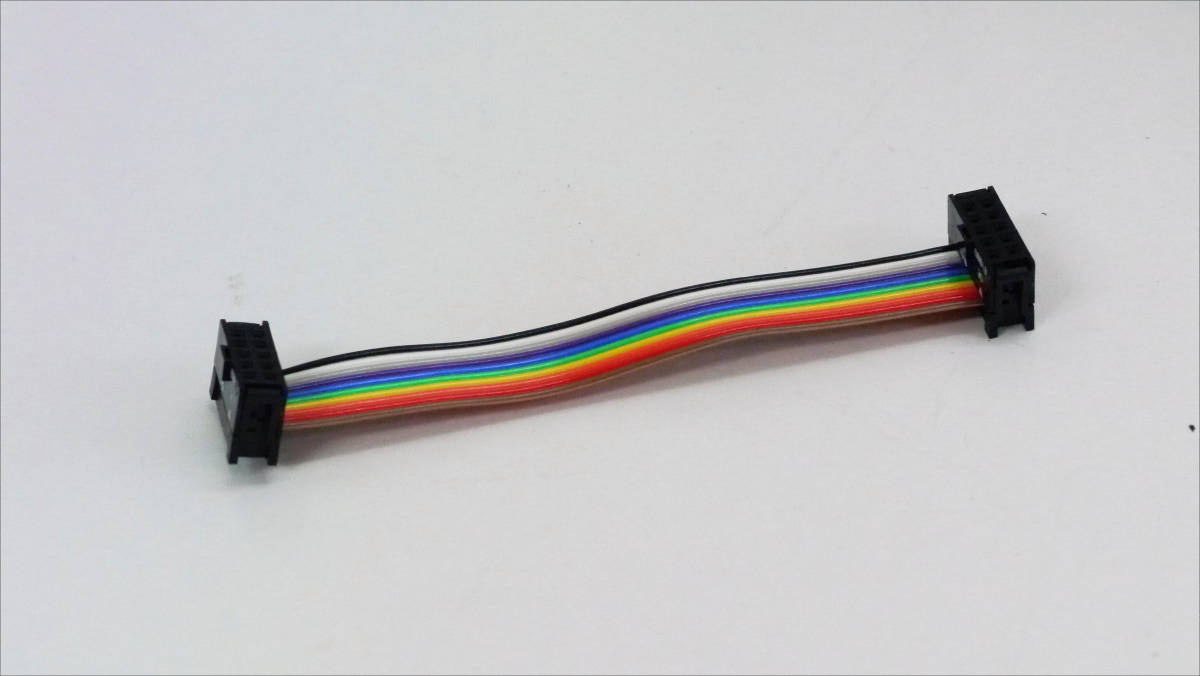
10芯フラットケーブルを装着し……
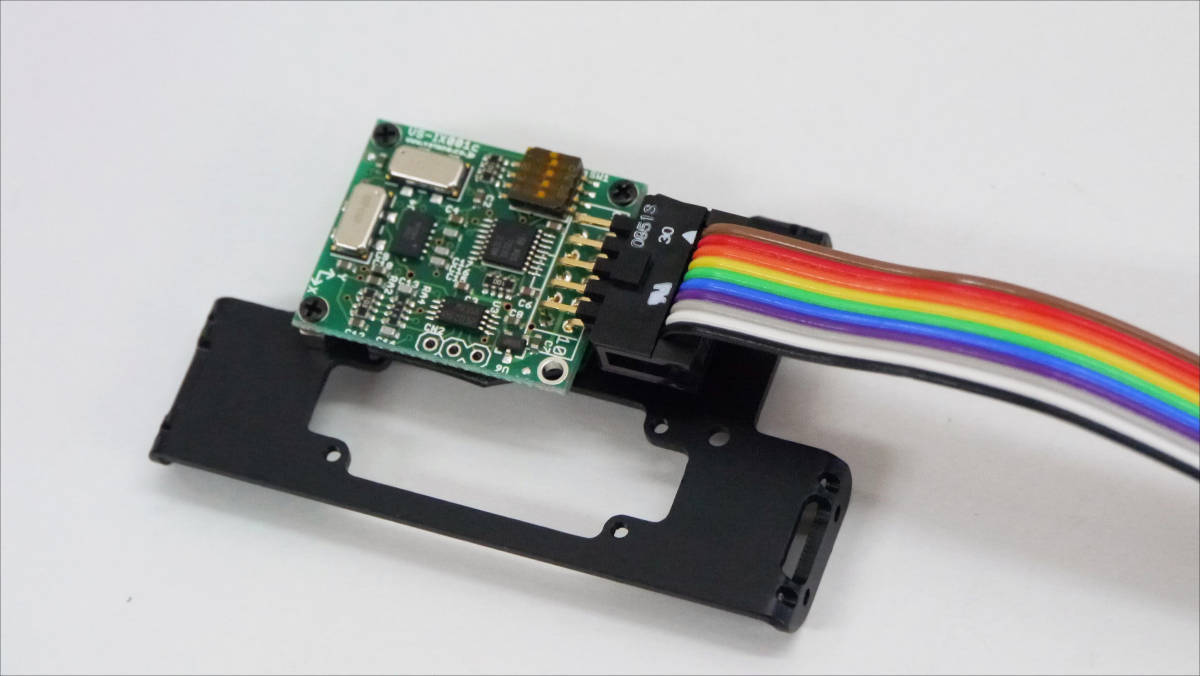
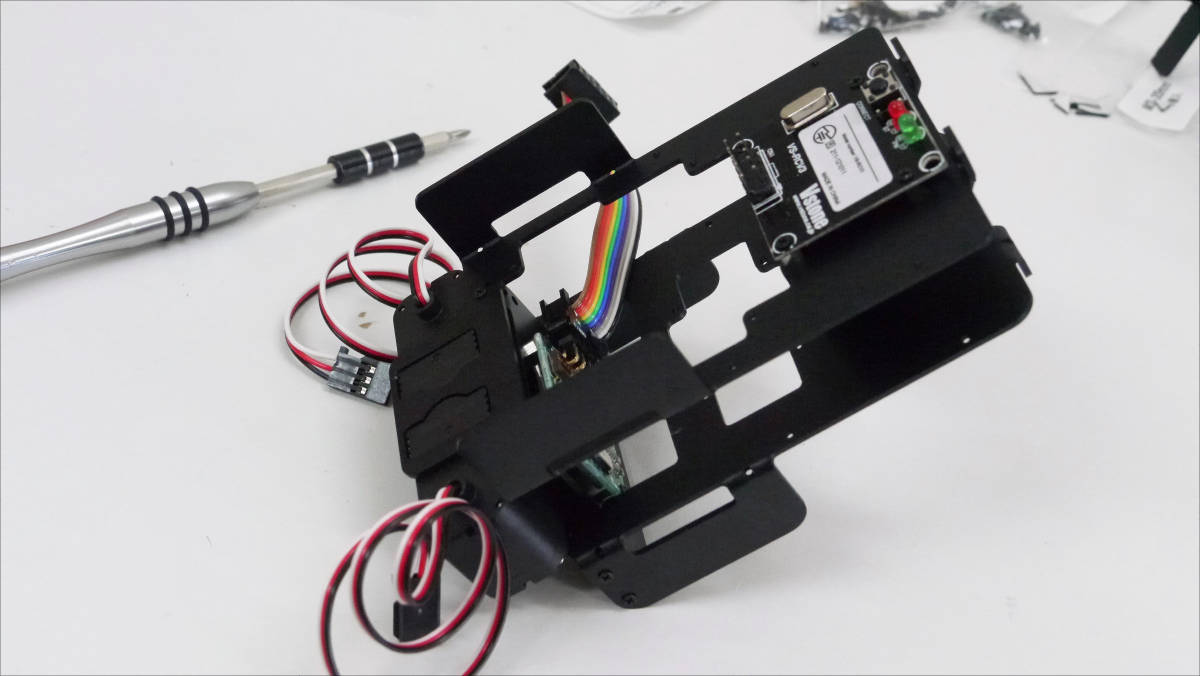
胴体前部にジャイロ/加速度センサーが組み込まれました。
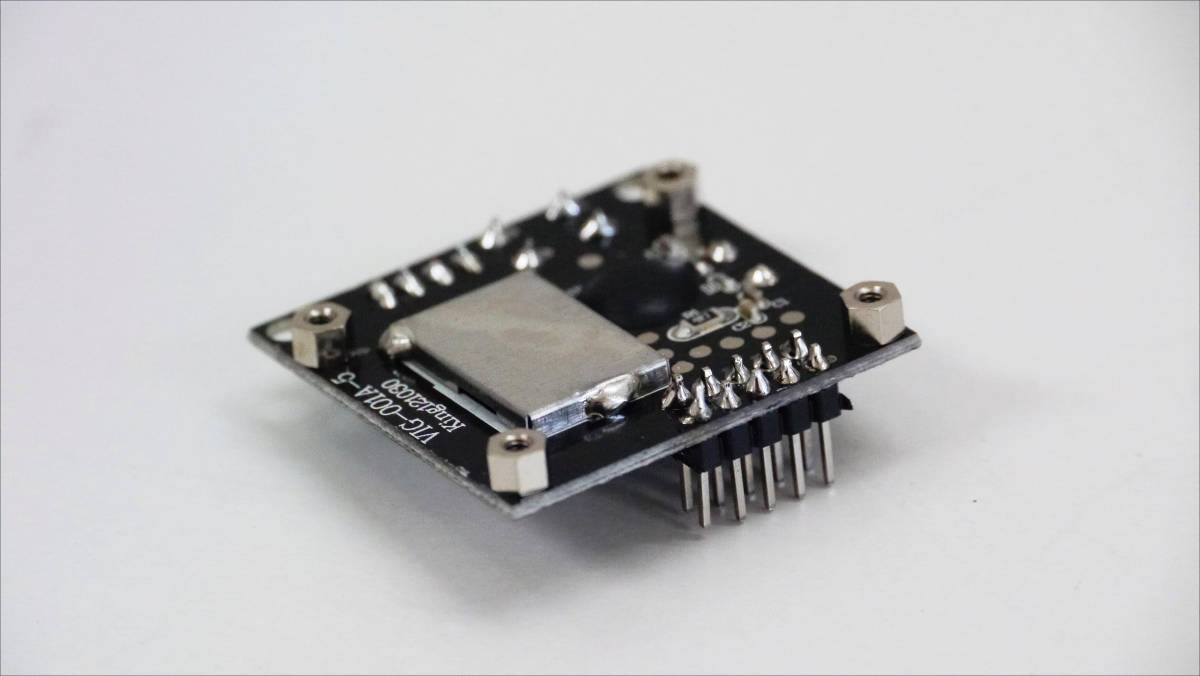
続いて、VS-C3受信モジュールを組み込みます。
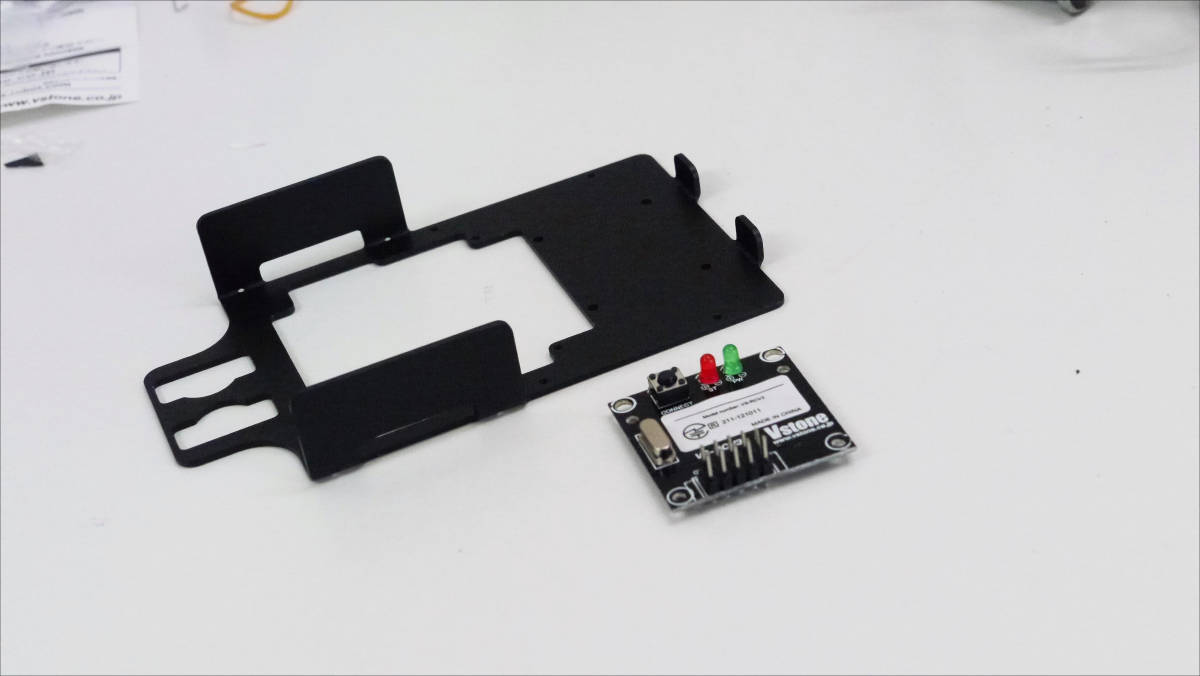
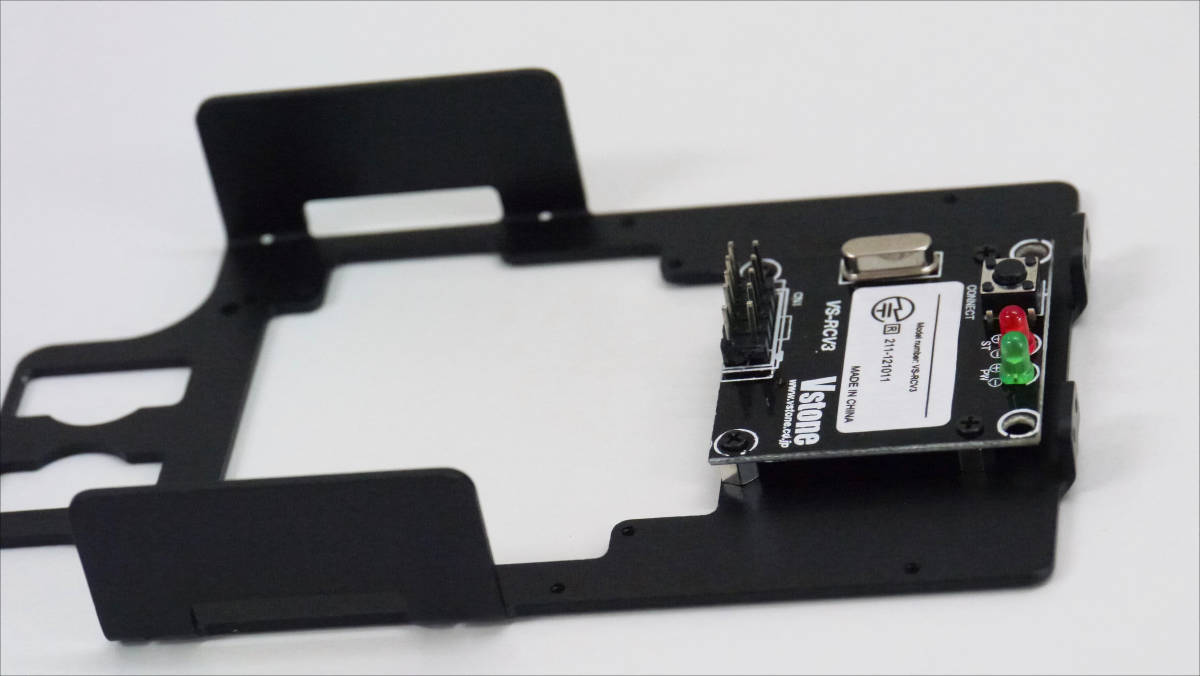
VS-C3受信モジュール裏にスペーサーを付けて……
胴体後部にVS-C3受信モジュールが装着されました。
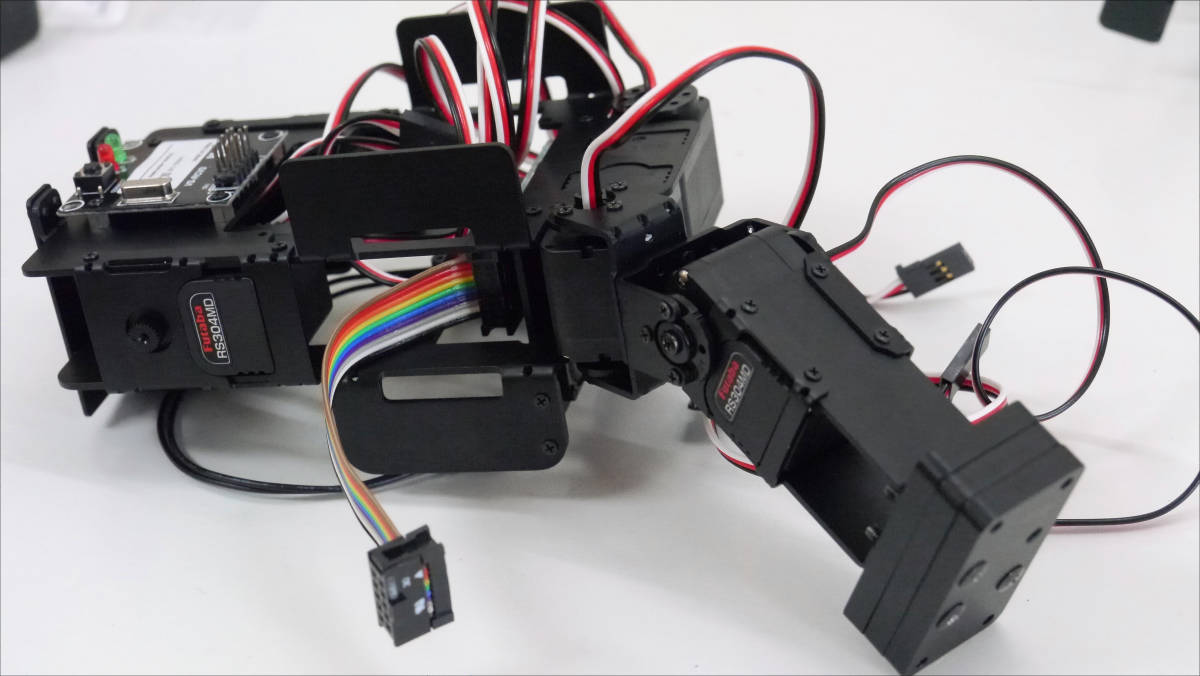
サーボ2台を組み込み……
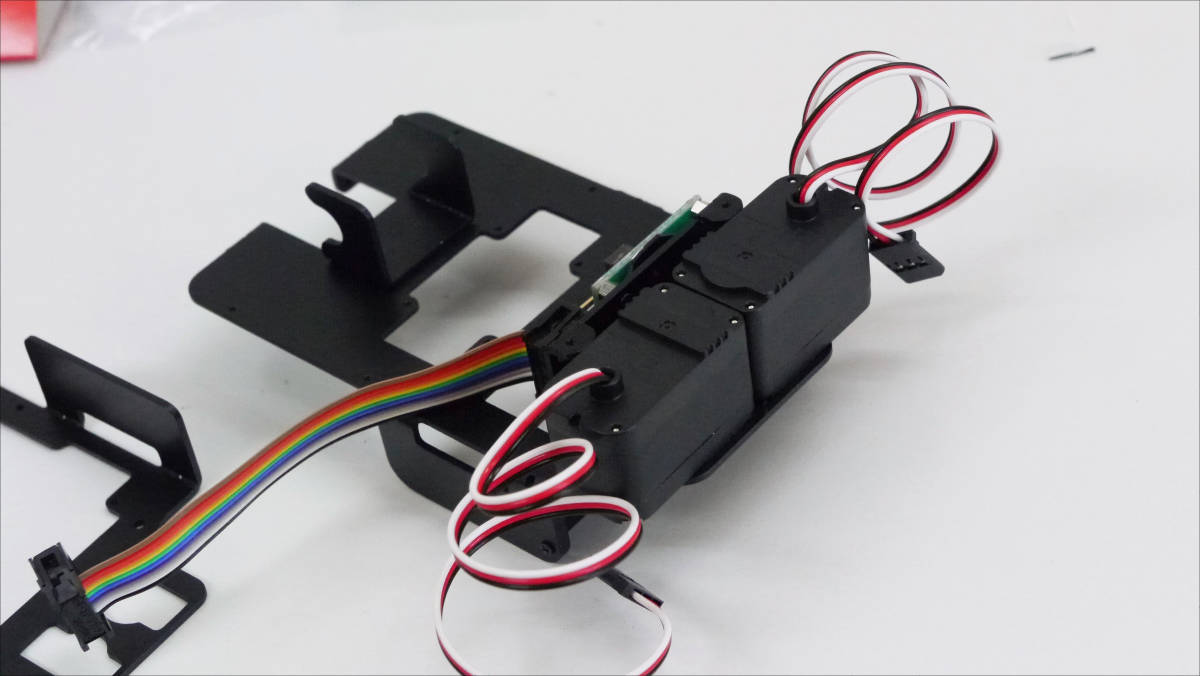
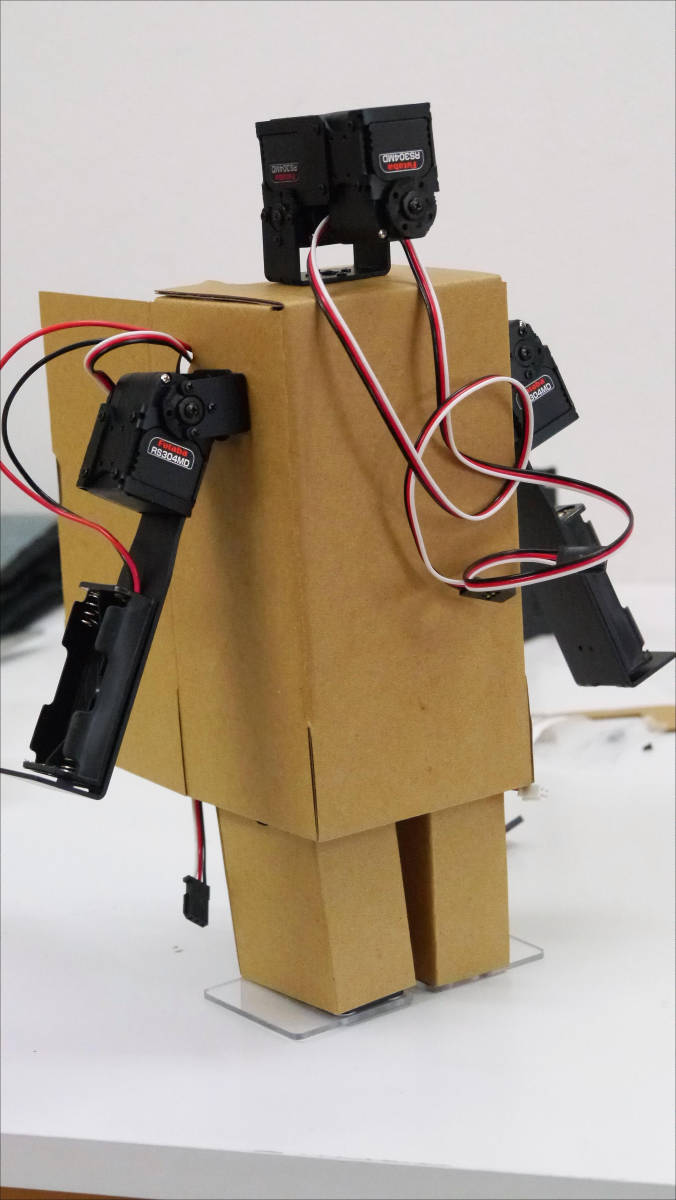
胴体前部と胴体後部を合体させます。
サーボのケーブルを胴体後部の穴に通し……
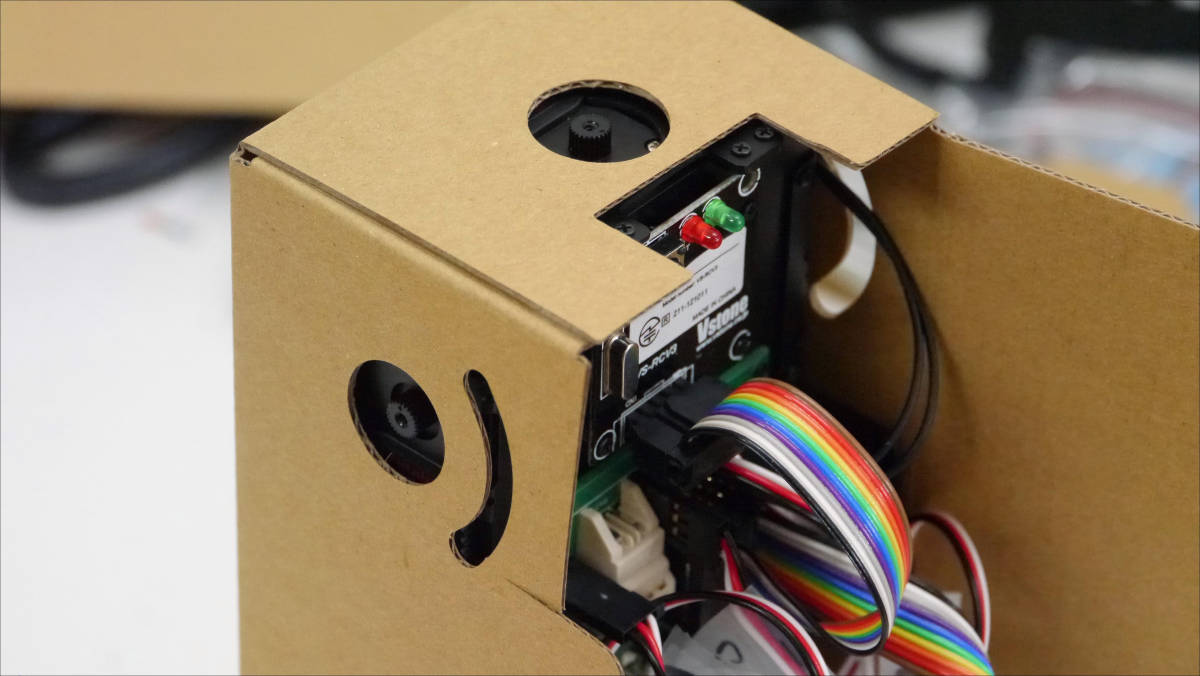
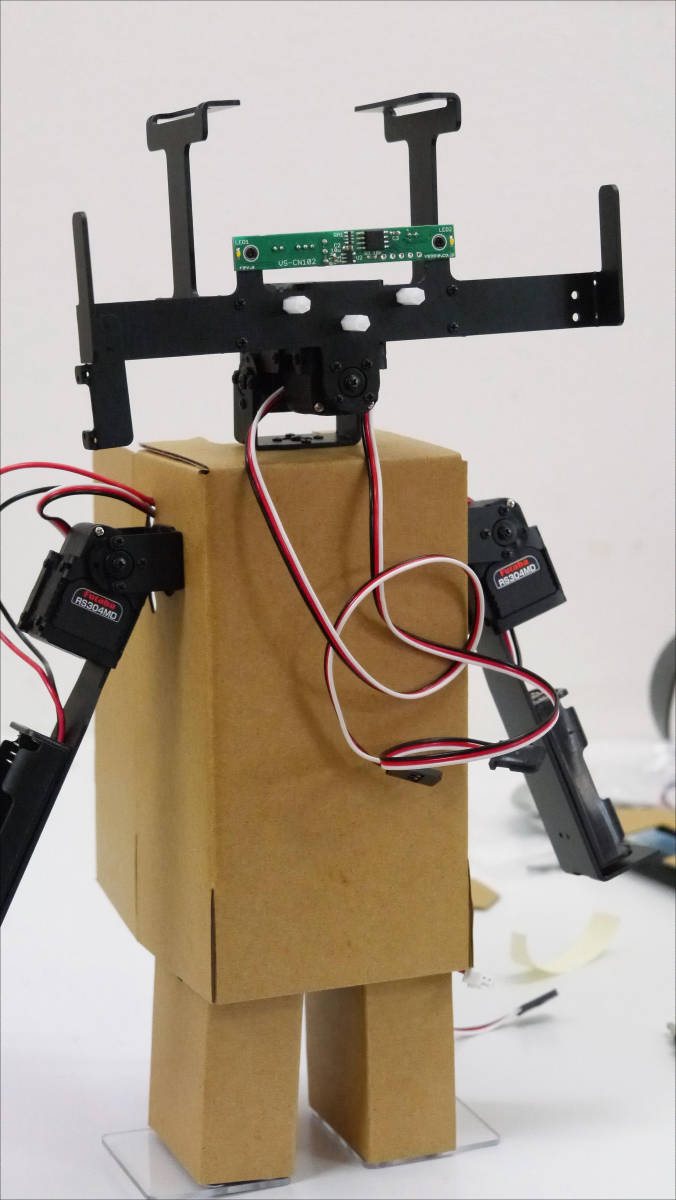
上部にサーボを装着。これは首部分になります。

さらに左右の側面にもサーボを装着。
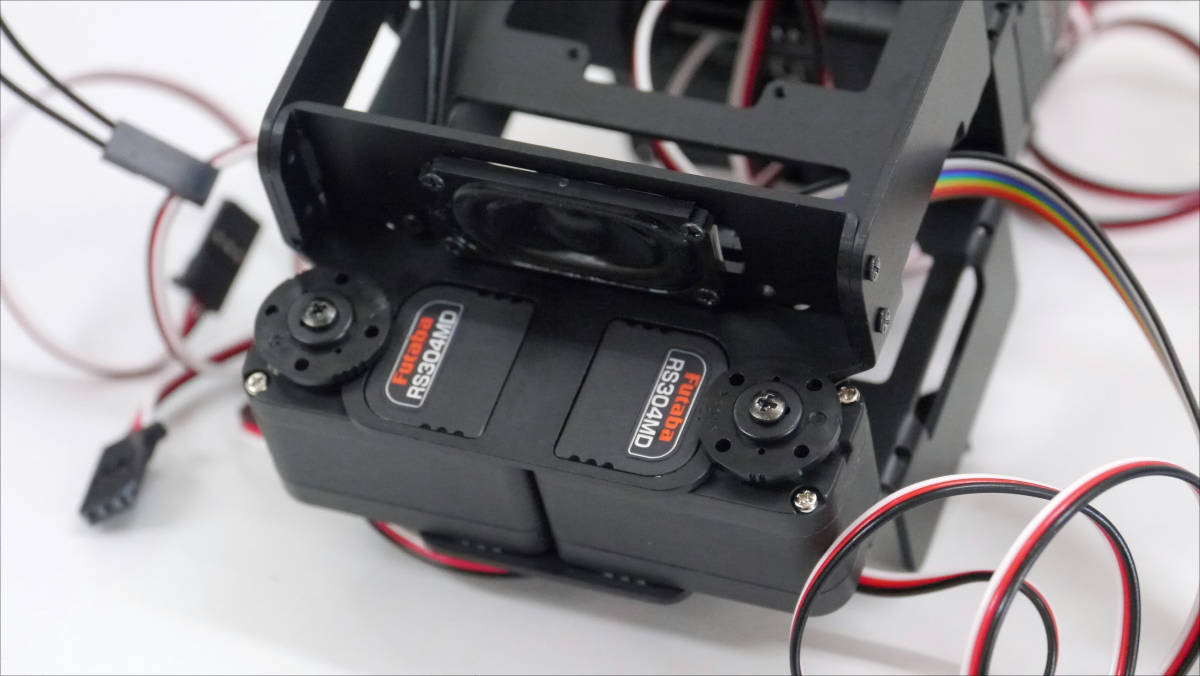
スピーカーケーブルを写真中央の穴に通してから……

スピーカーを装着。

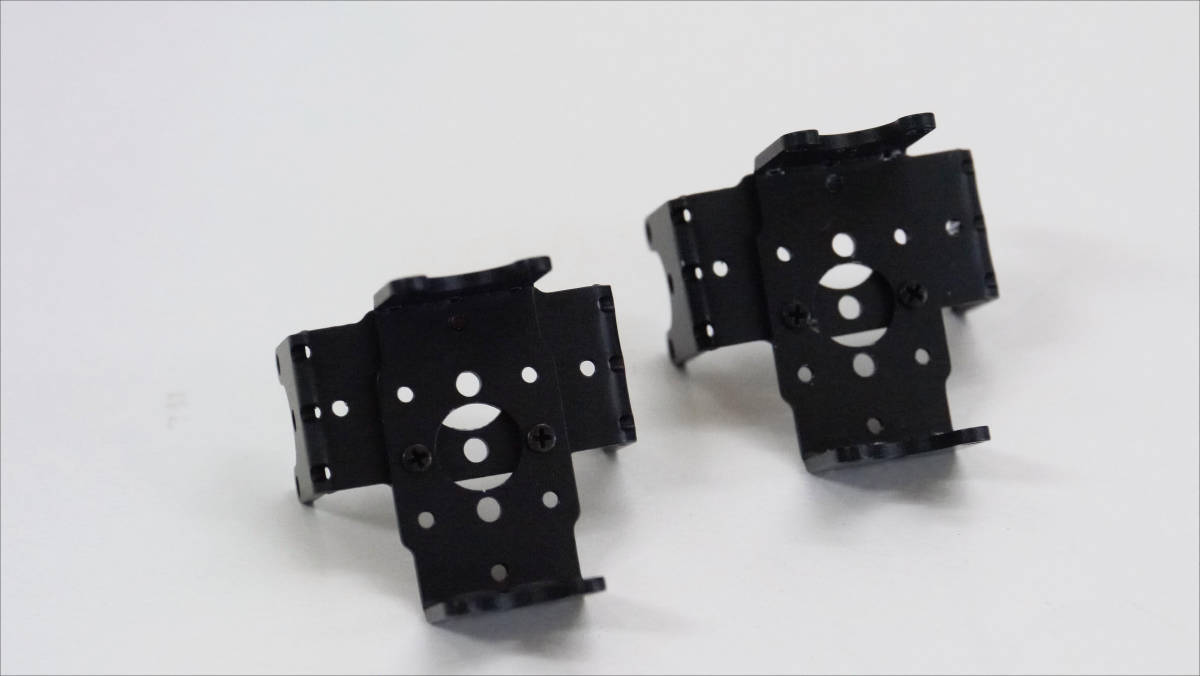
次に脚関節を作成します。

金属パーツをこのようにセット。
2つ作ります。
先ほど作っておいた両足部分を用意。

サーボ裏にフリーホーンをはめ込んでから……
金属パーツを装着します。

胴体部分のサーボに……
脚を装着。
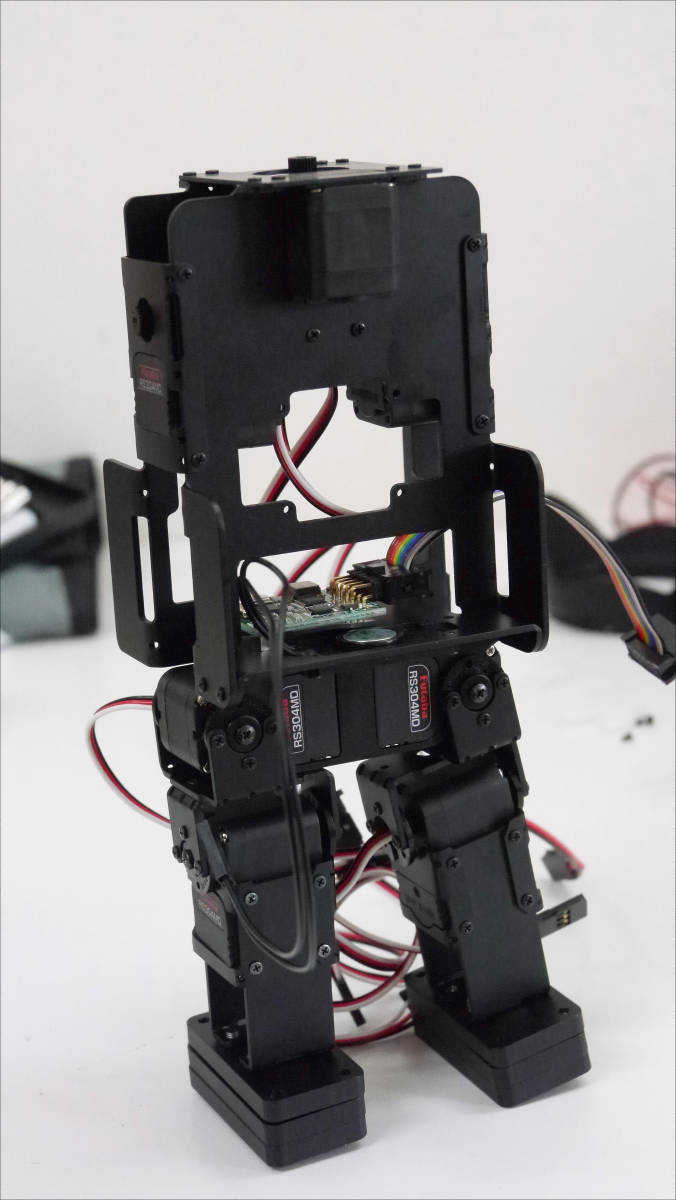
ロボダンボーが立ちました。
次に、胴体にCPUボードを装着し、配線していきます。
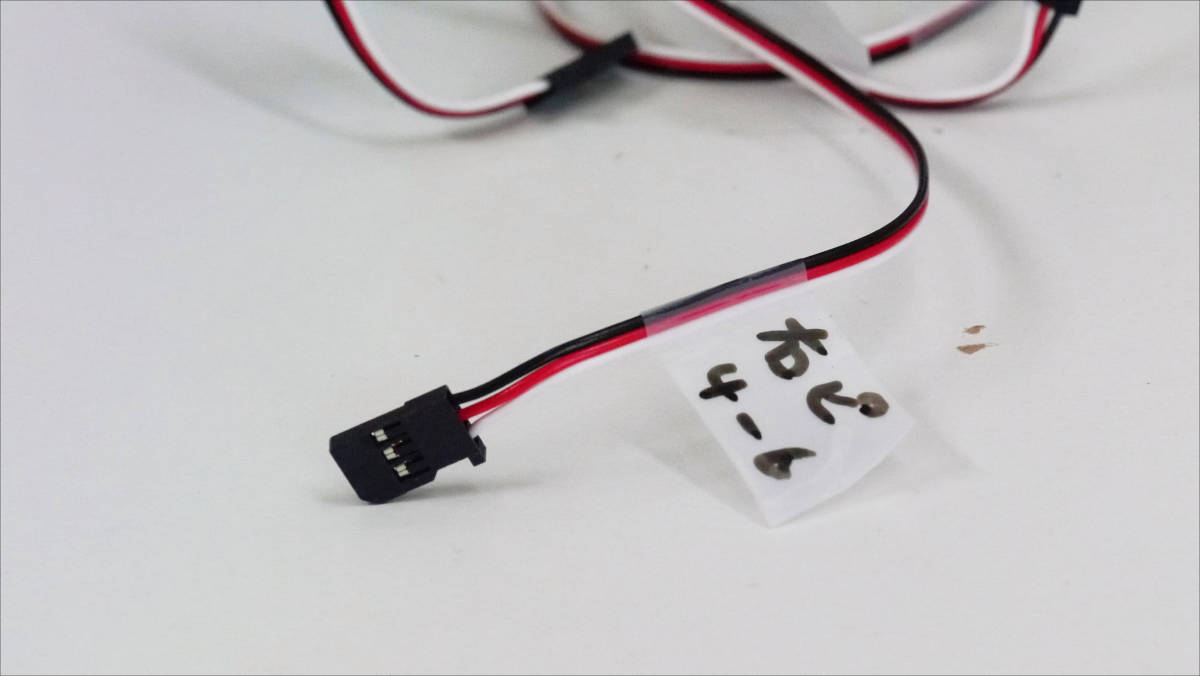
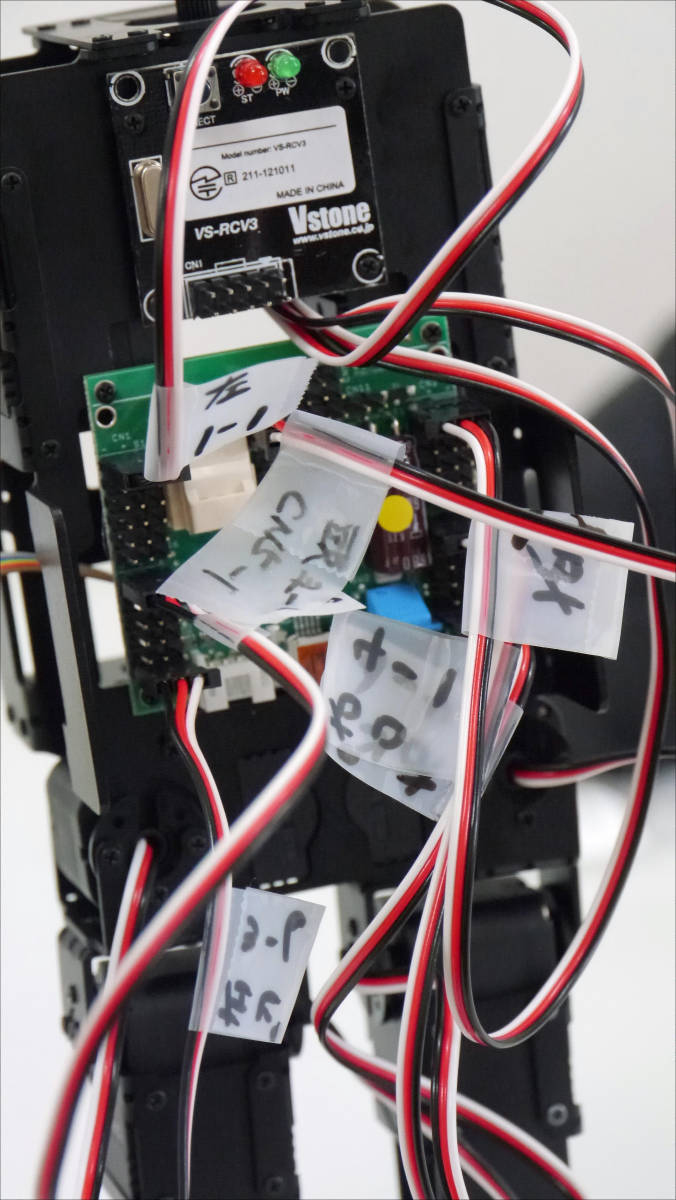
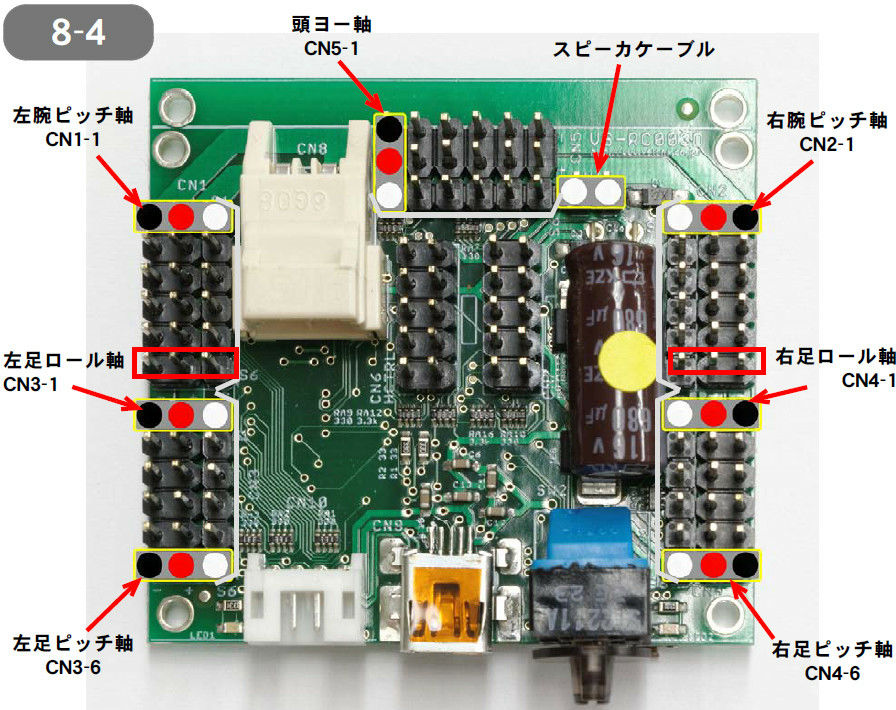
まずは、下準備としてすべてのサーボのケーブルにマーキング。これは「右脚ピッチ用サーボCN4-6」というしるしです。
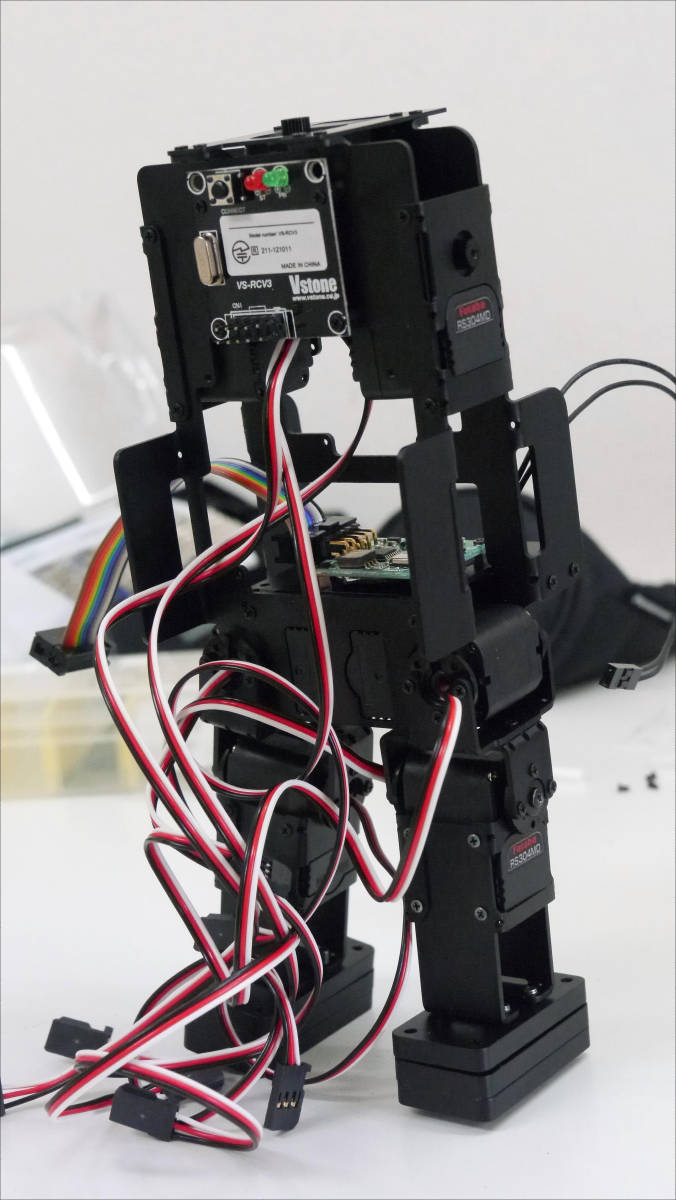
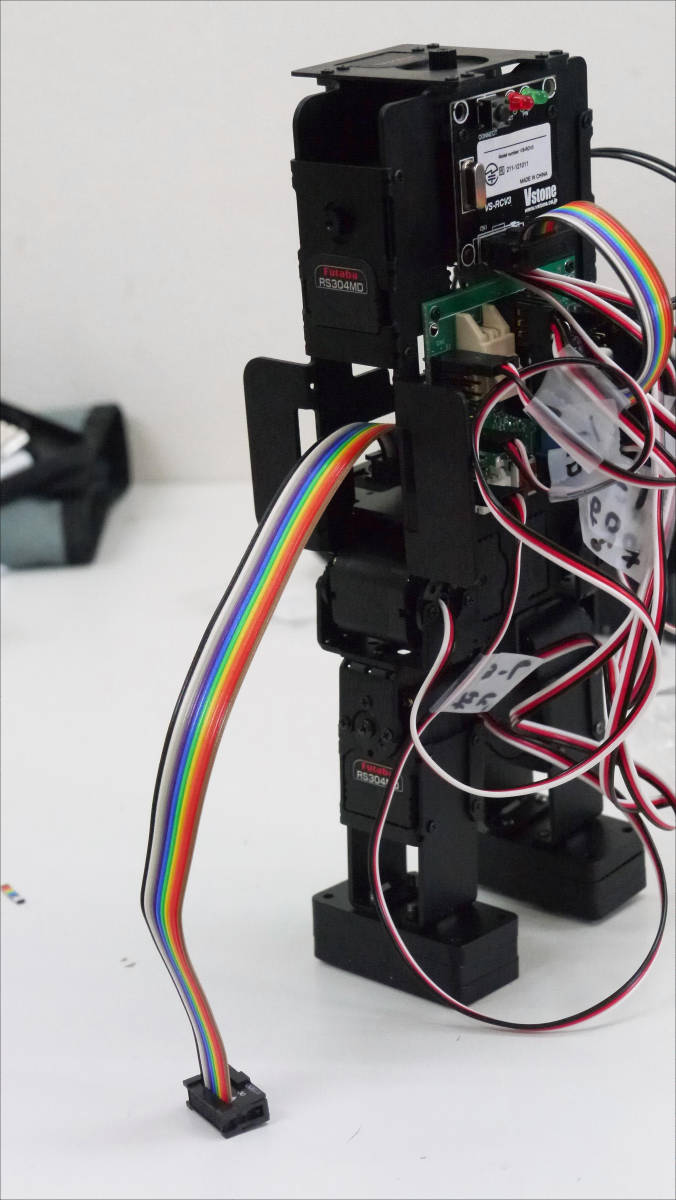
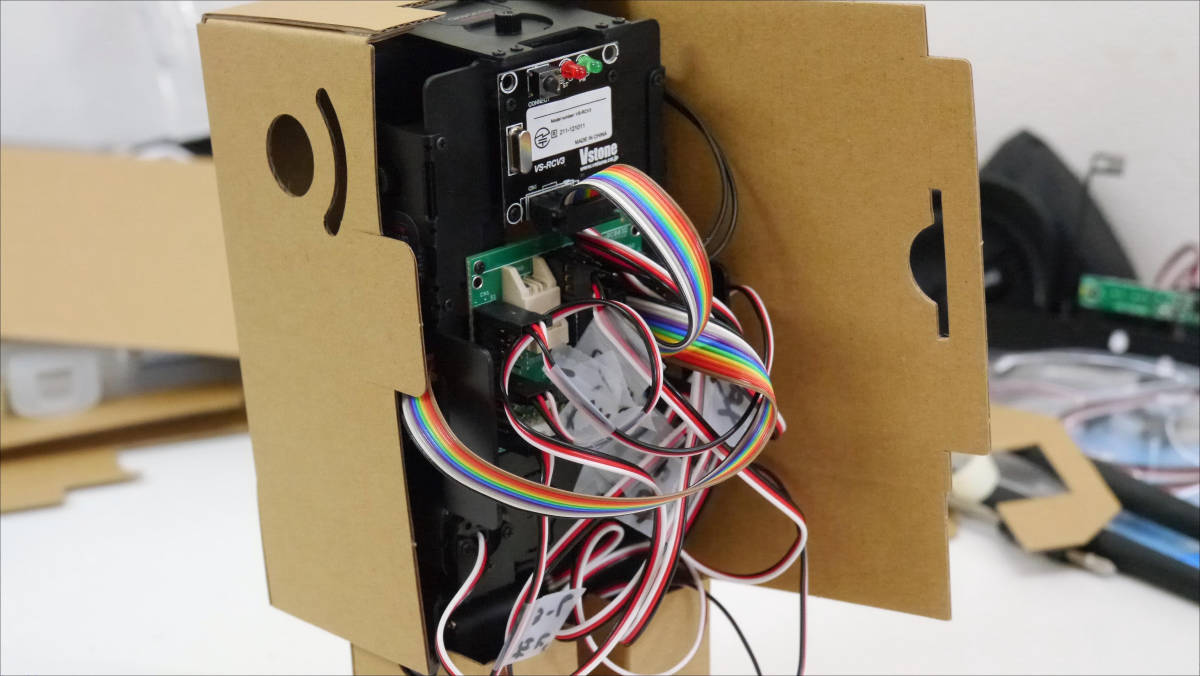
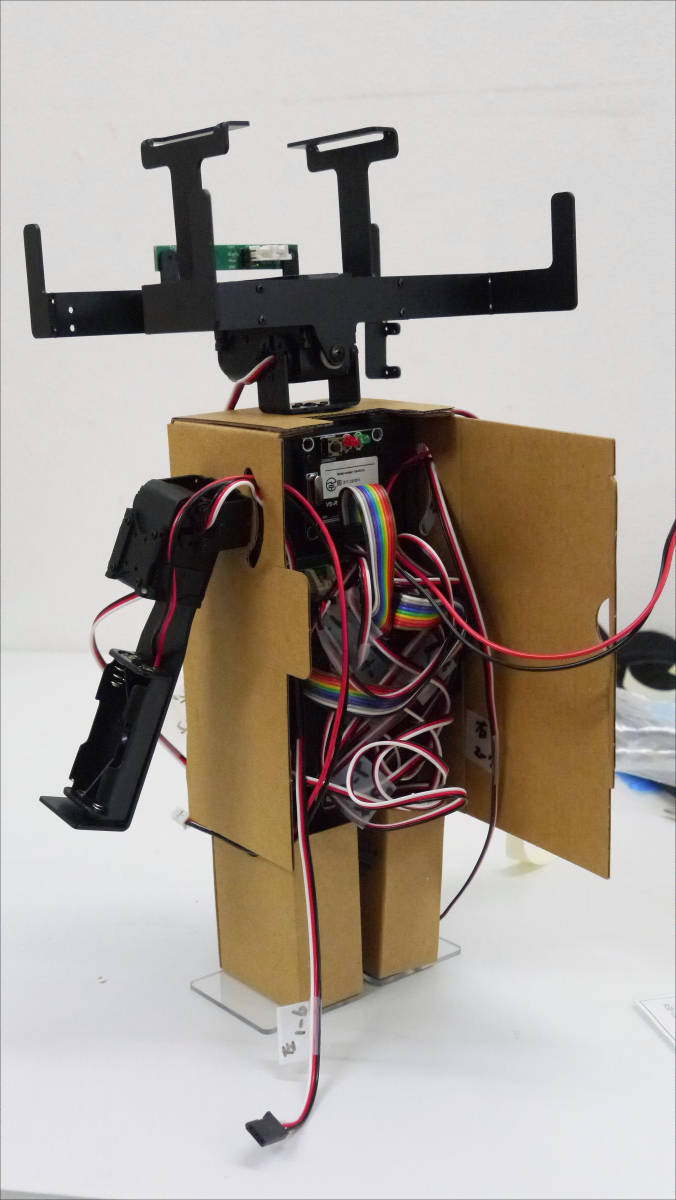
胴体中心にCPUボードを装着。ちなみにこちらはロボダンボーの背面になります。
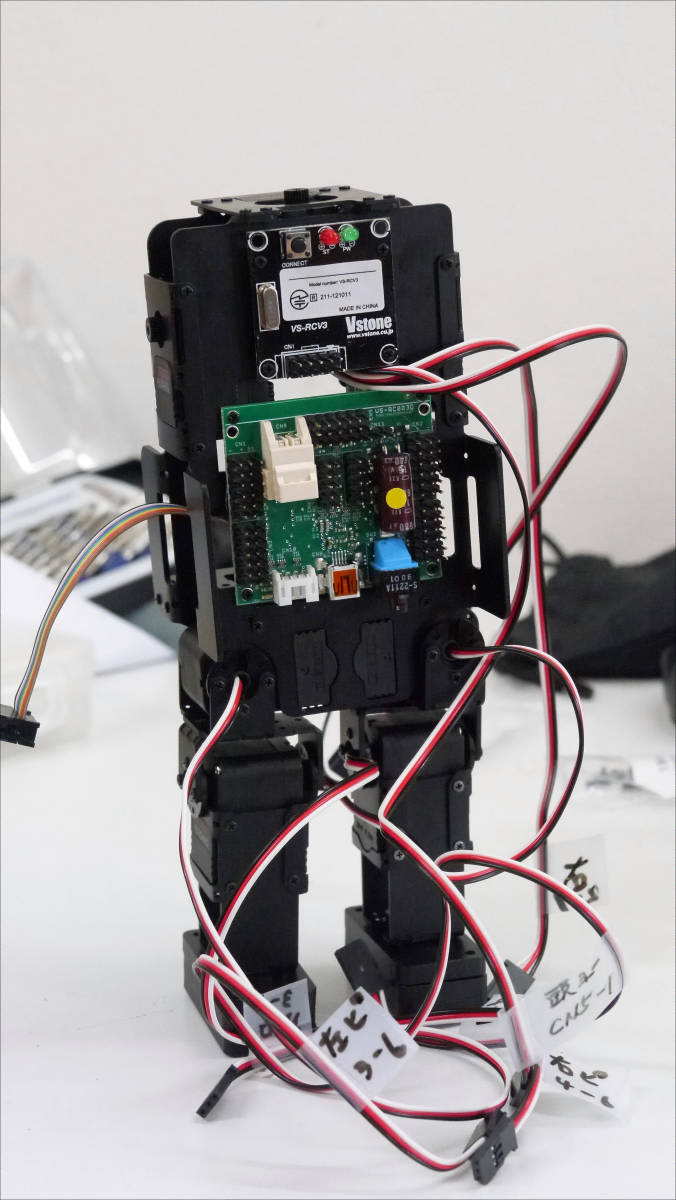
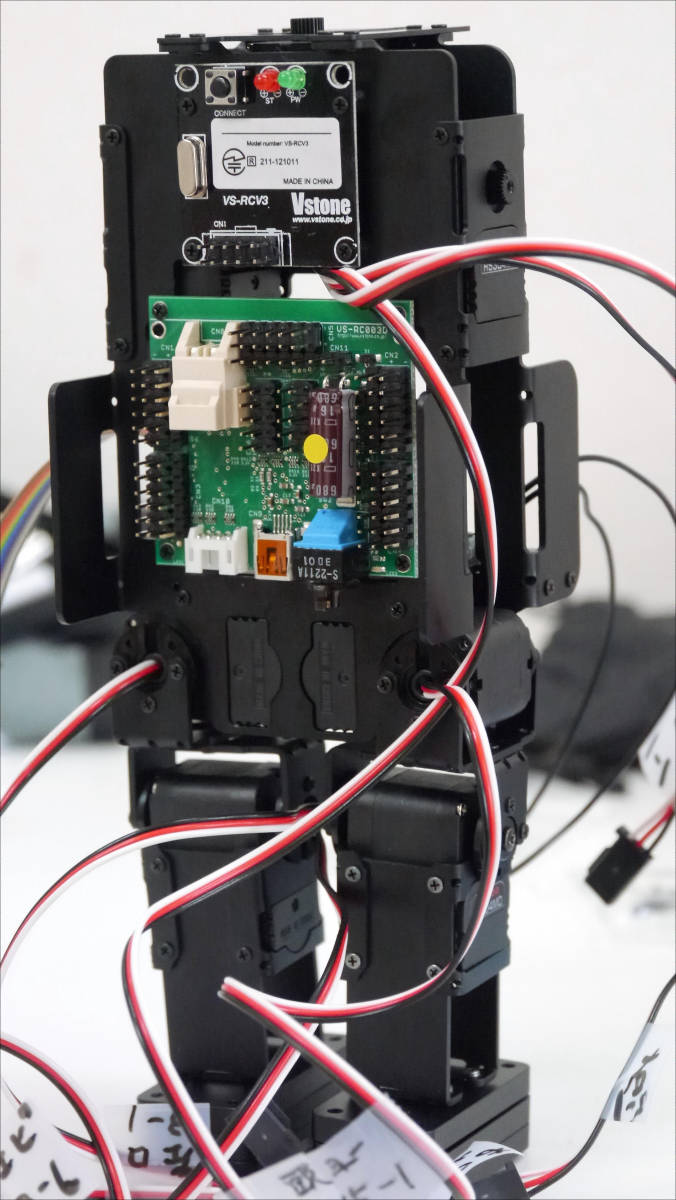
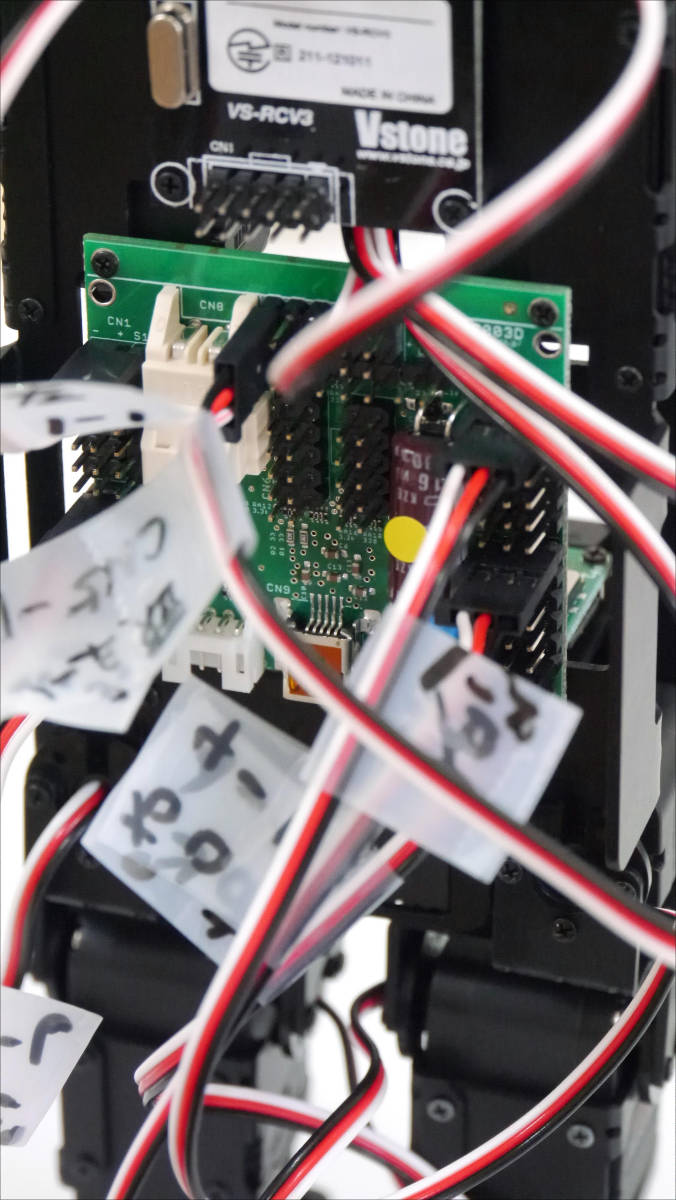
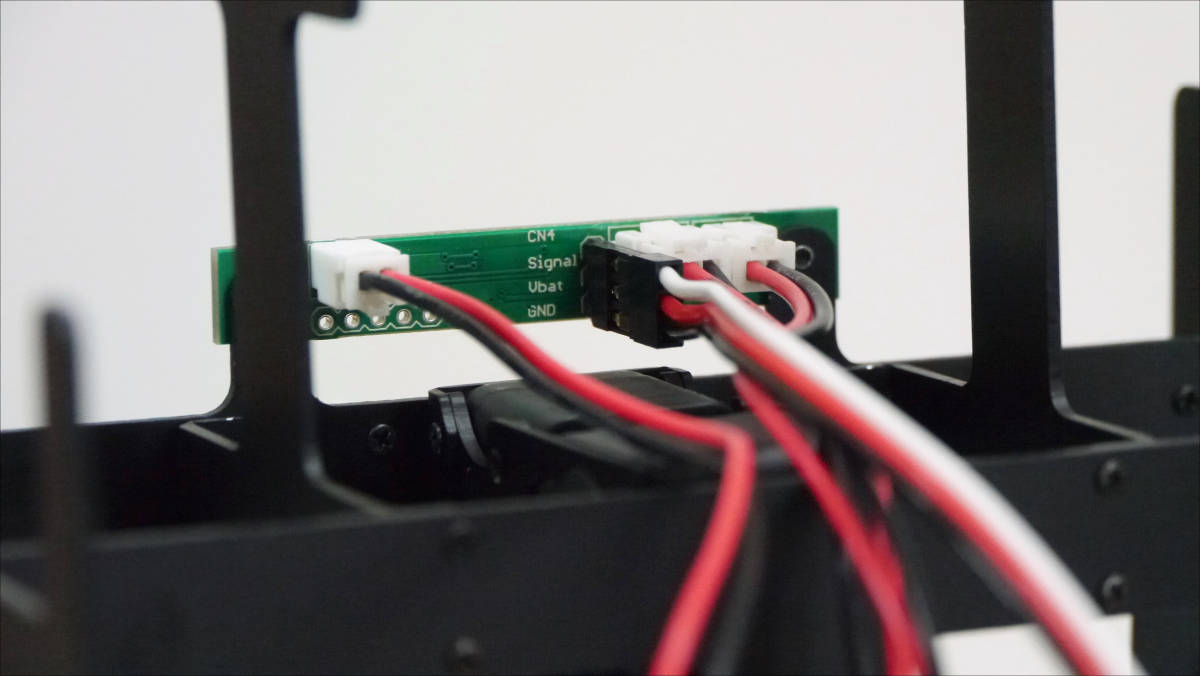
CPUボードのジャンパピンにサーボケーブルとジャイロ/加速度センサーケーブル、VS-C3受信モジュールを配線していきます。
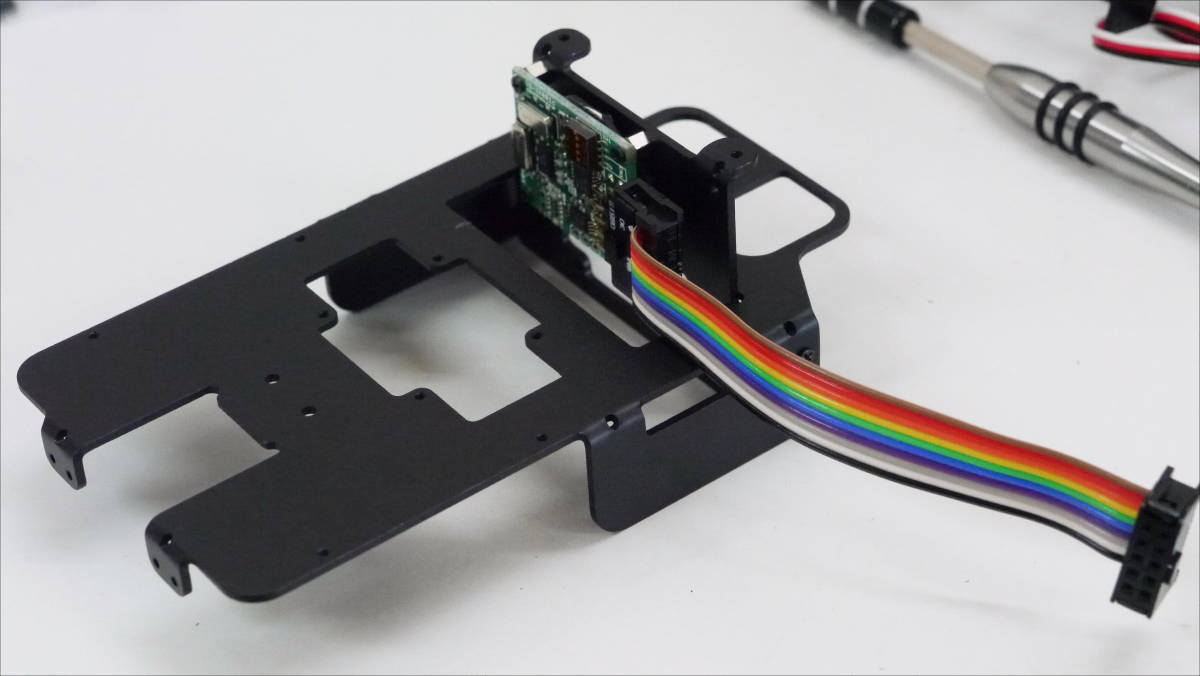
ここでジャイロ/加速度センサーケーブルの長さが足りないことが判明し、作り直すことに……。説明書には100mmとありましたが、200mmぐらいにしておいたほうがよさげ。コネクターを外すときは、両サイドの爪を折らないよう慎重に外す必要があります。
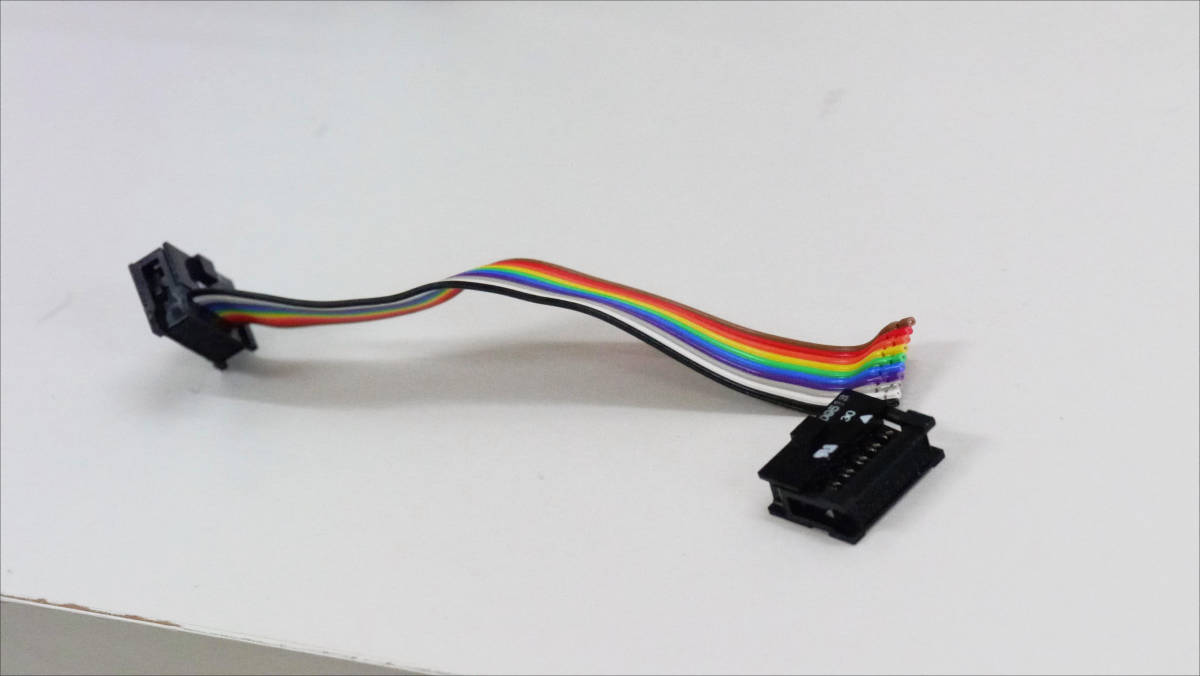
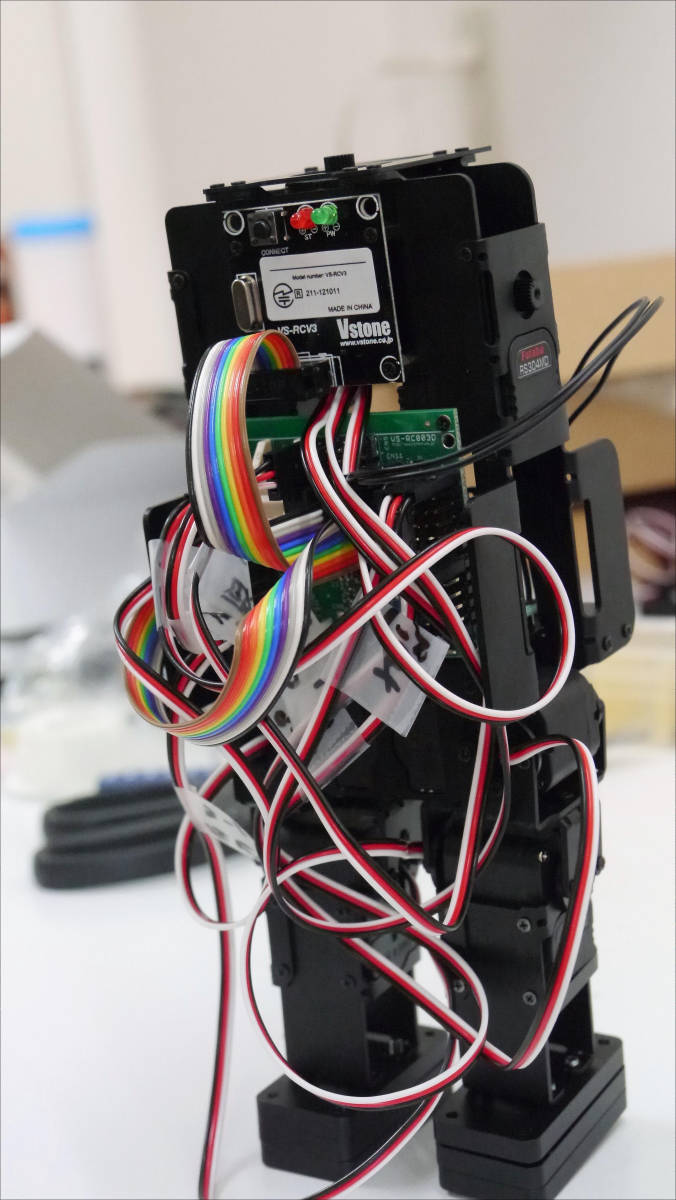
改めて、10芯フラットケーブルを200mmで作成。
うまく所定のジャンパピンまで届きました。
ようやく外装に着手します。
こちらは脚の外装部分。
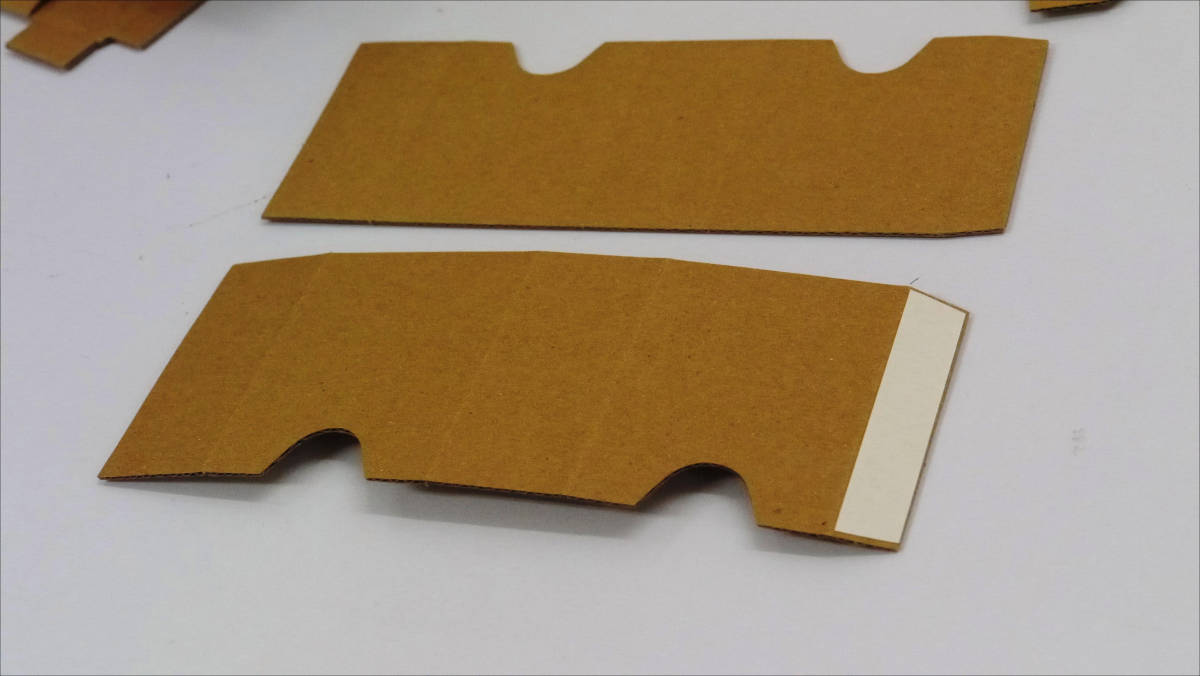
両面テープで固定します。
2足分完成。
ロボダンボーに履かせます。
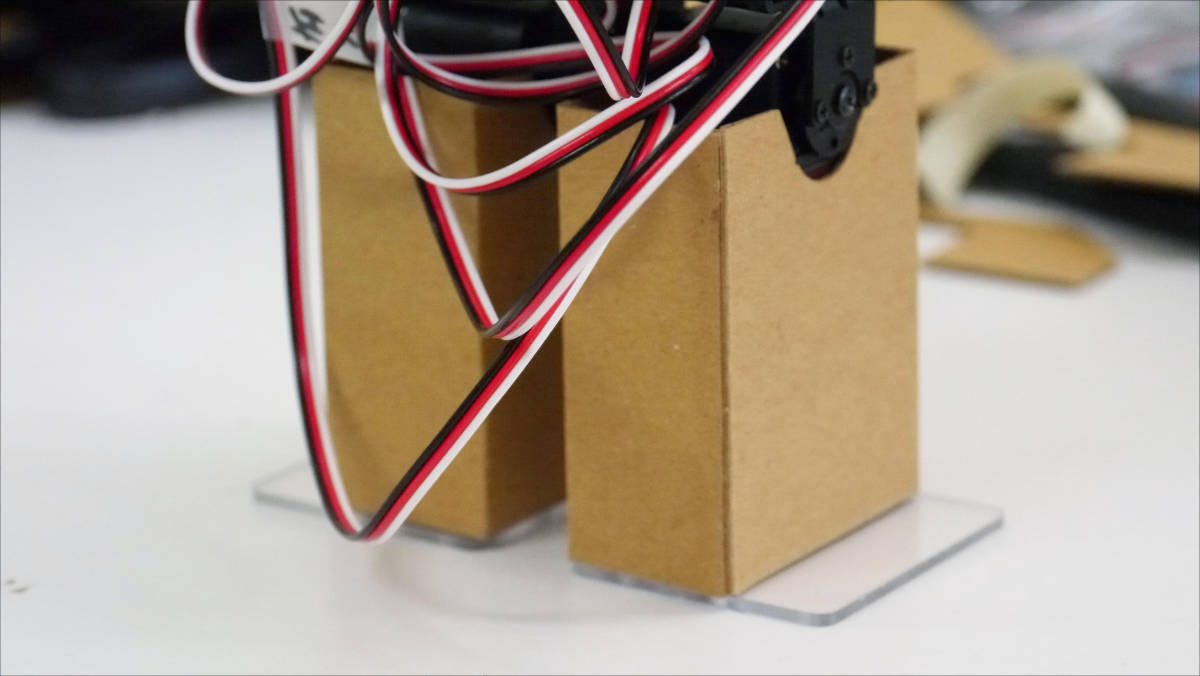
足の裏に透明なプレートを装着。
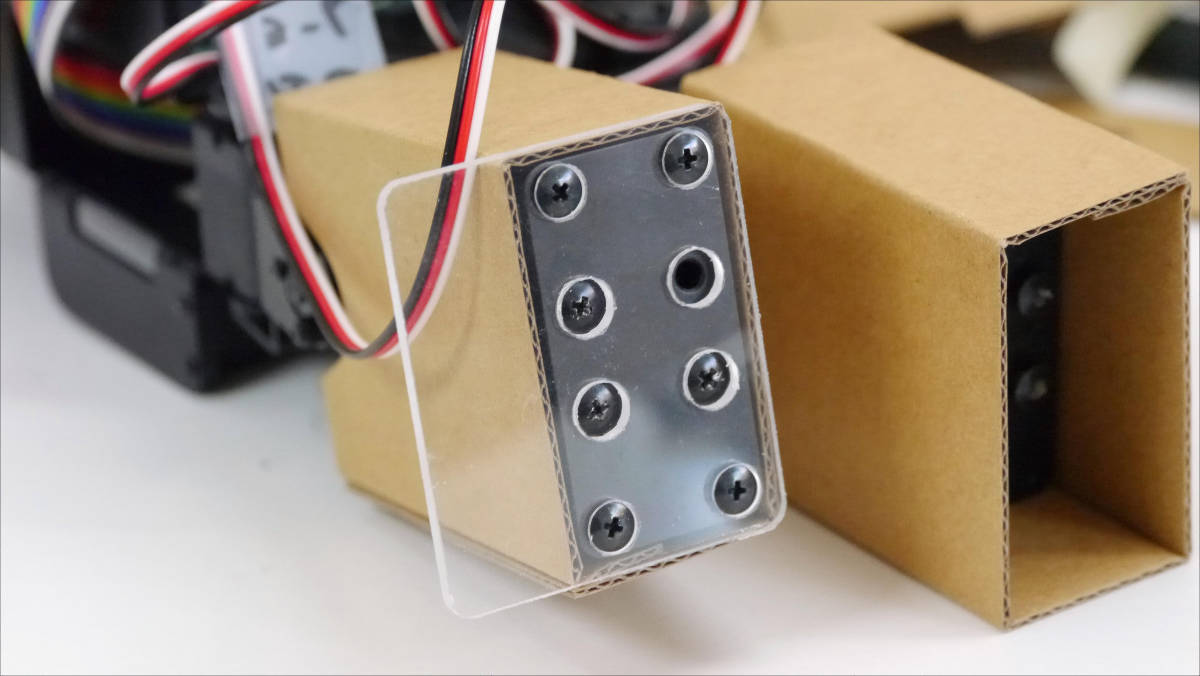
安定性がアップしました。
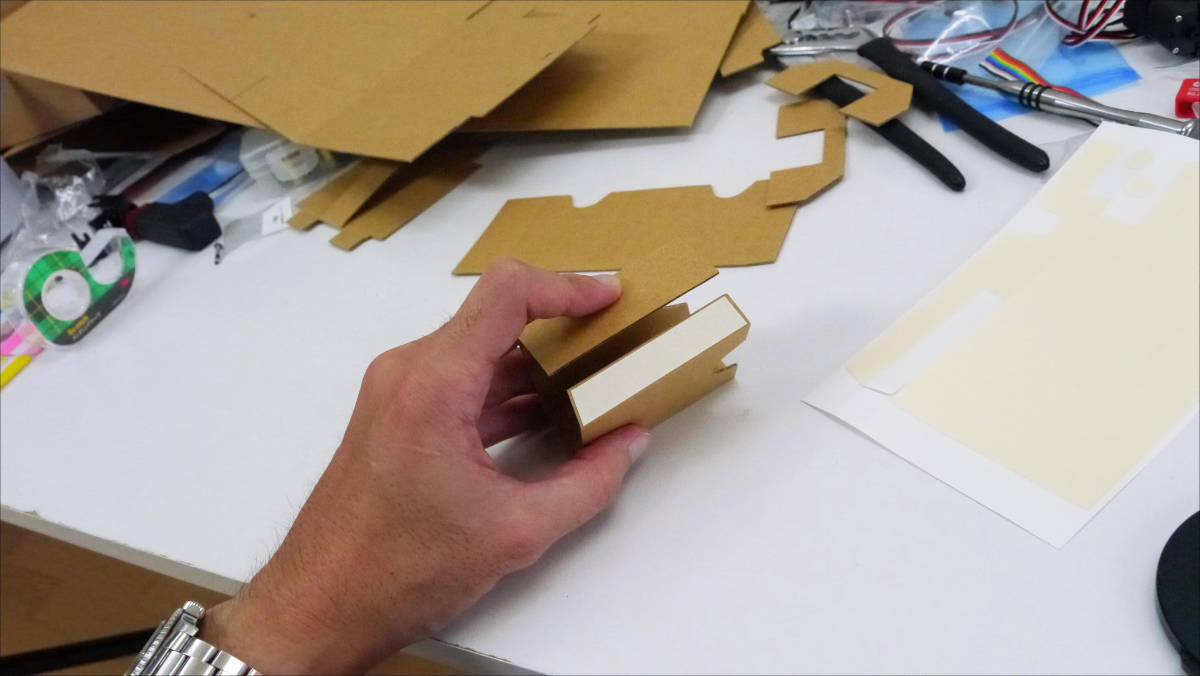
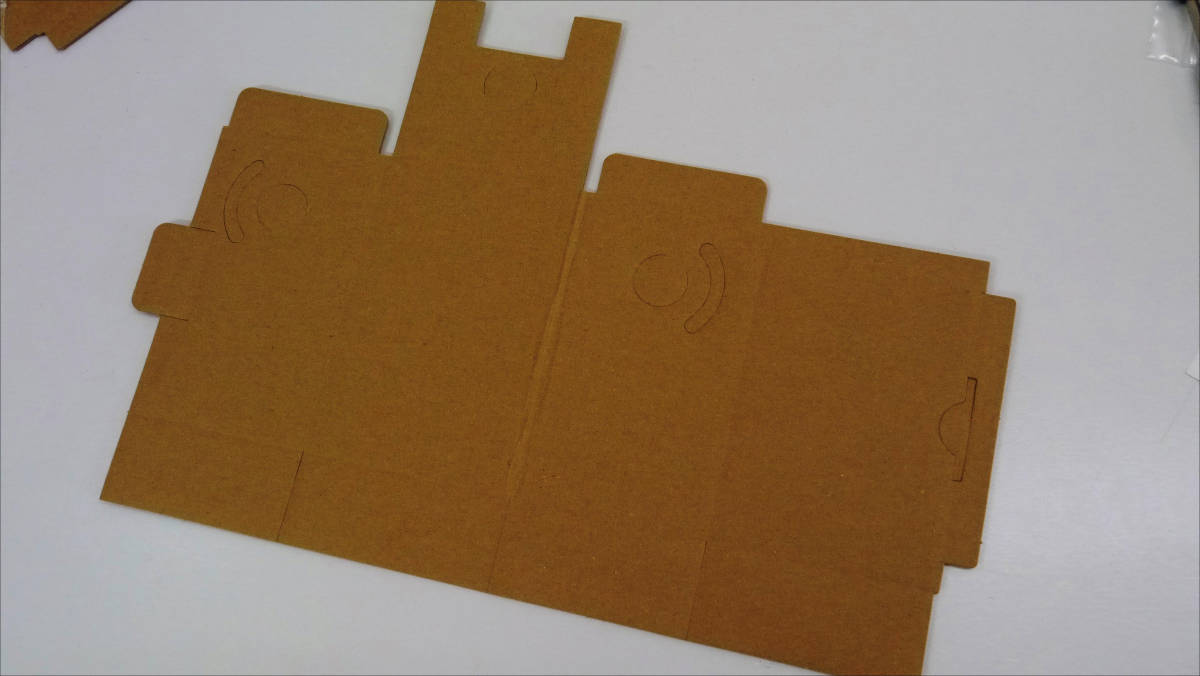
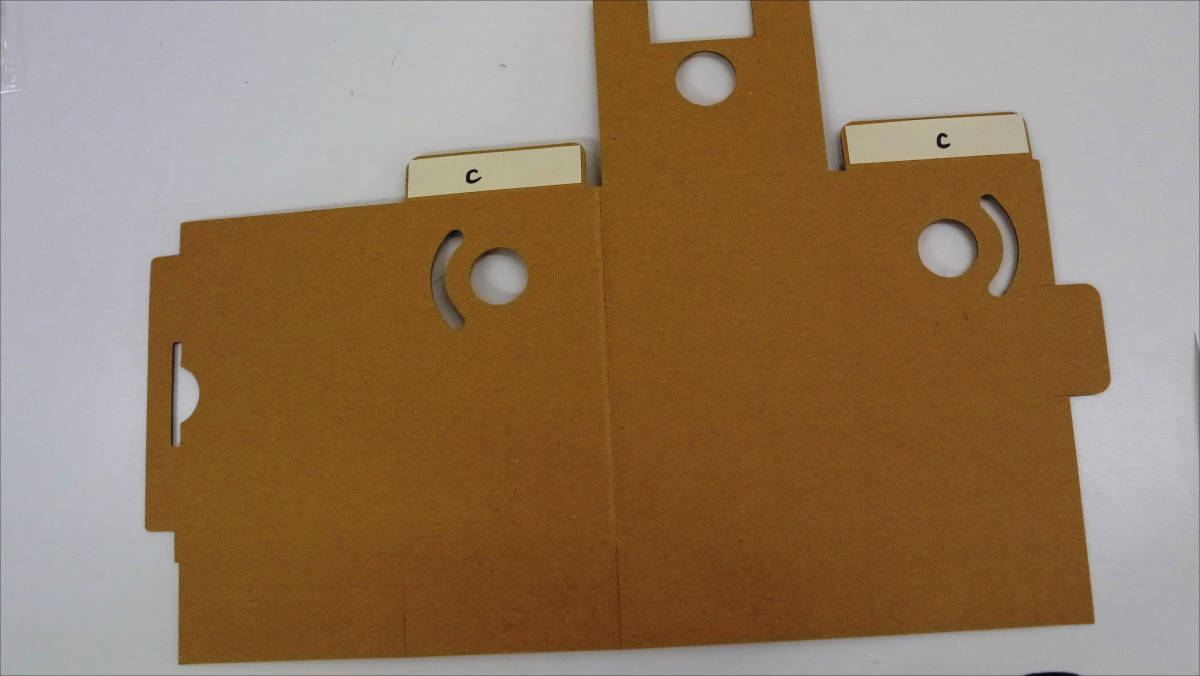
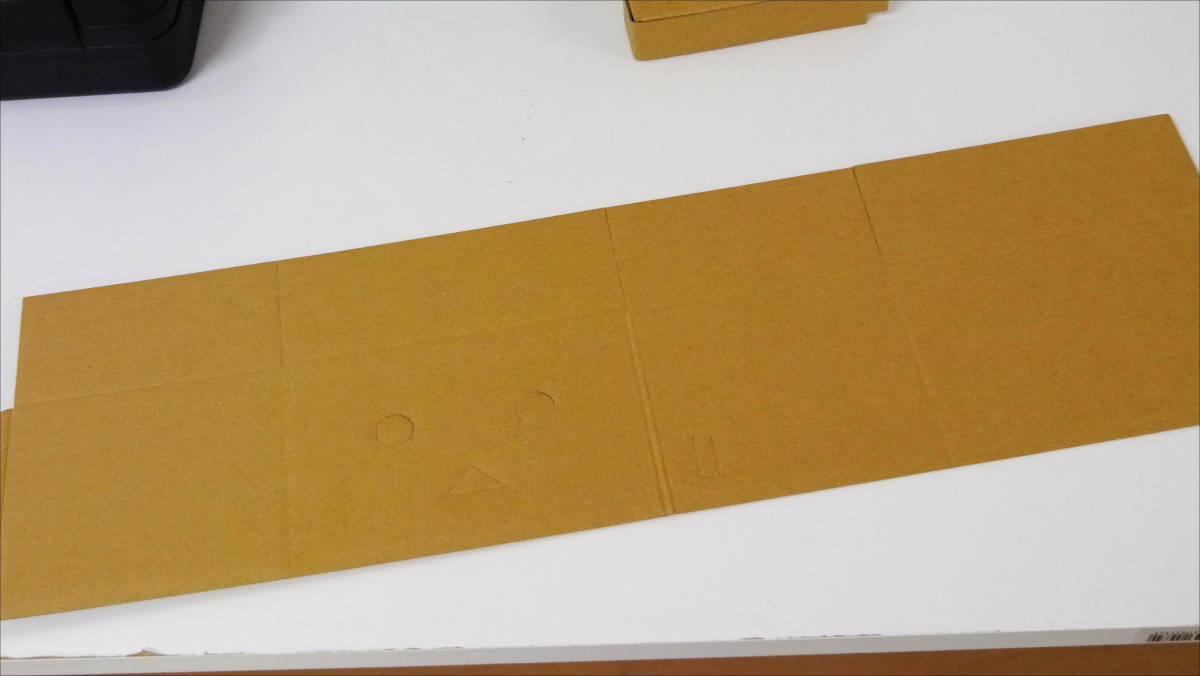
これは胴体部分の外装パーツ。
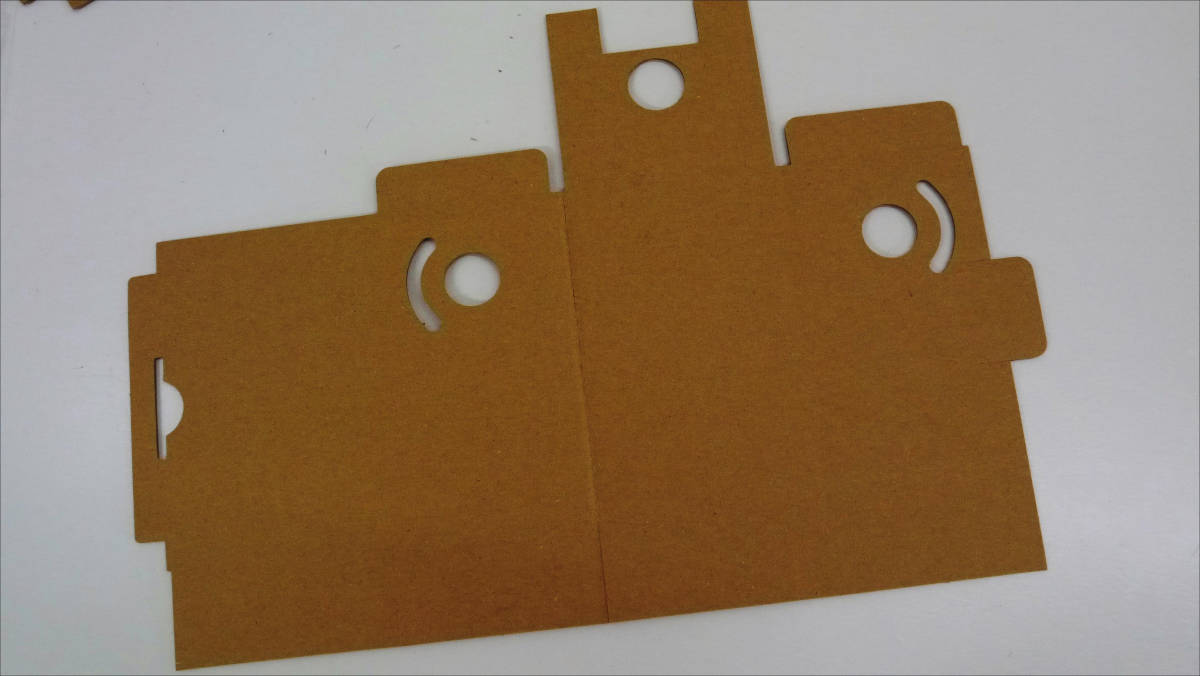
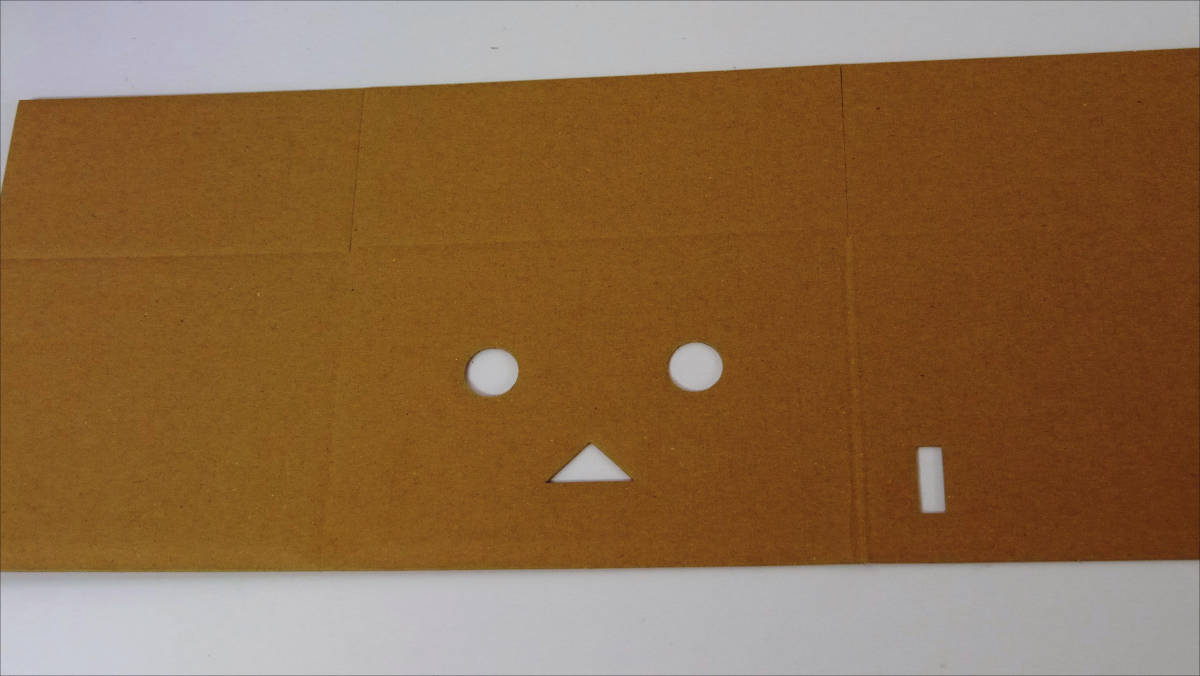
穴をくりぬいたところ。
両面テープを貼り……
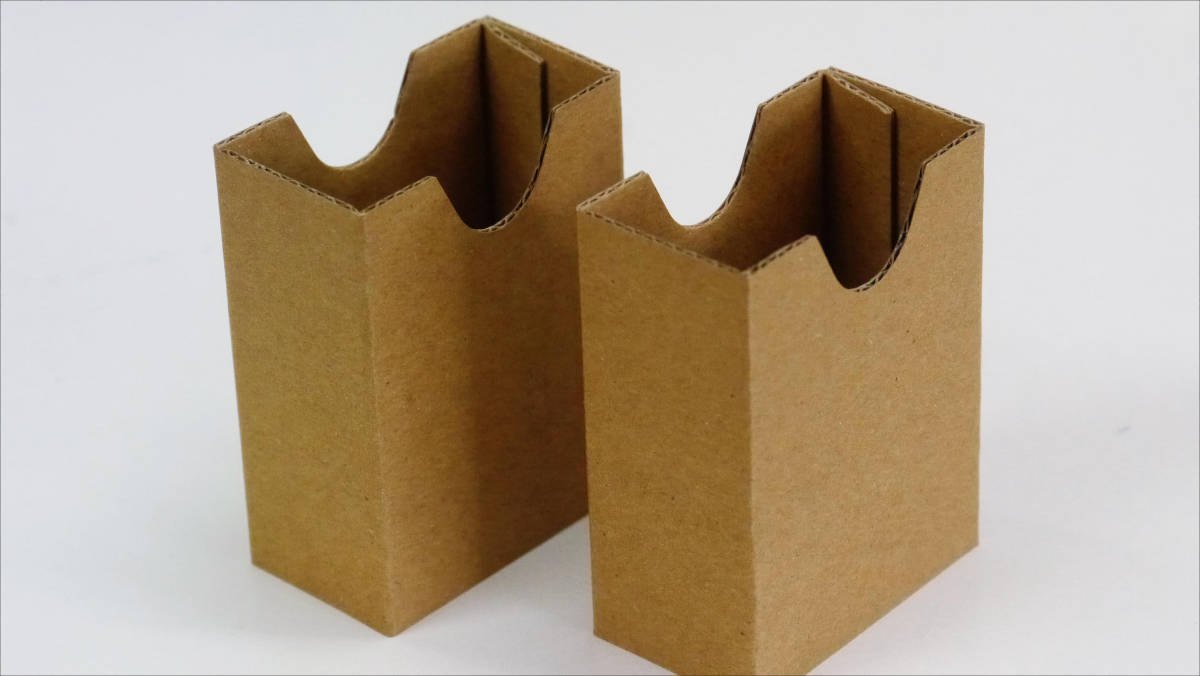
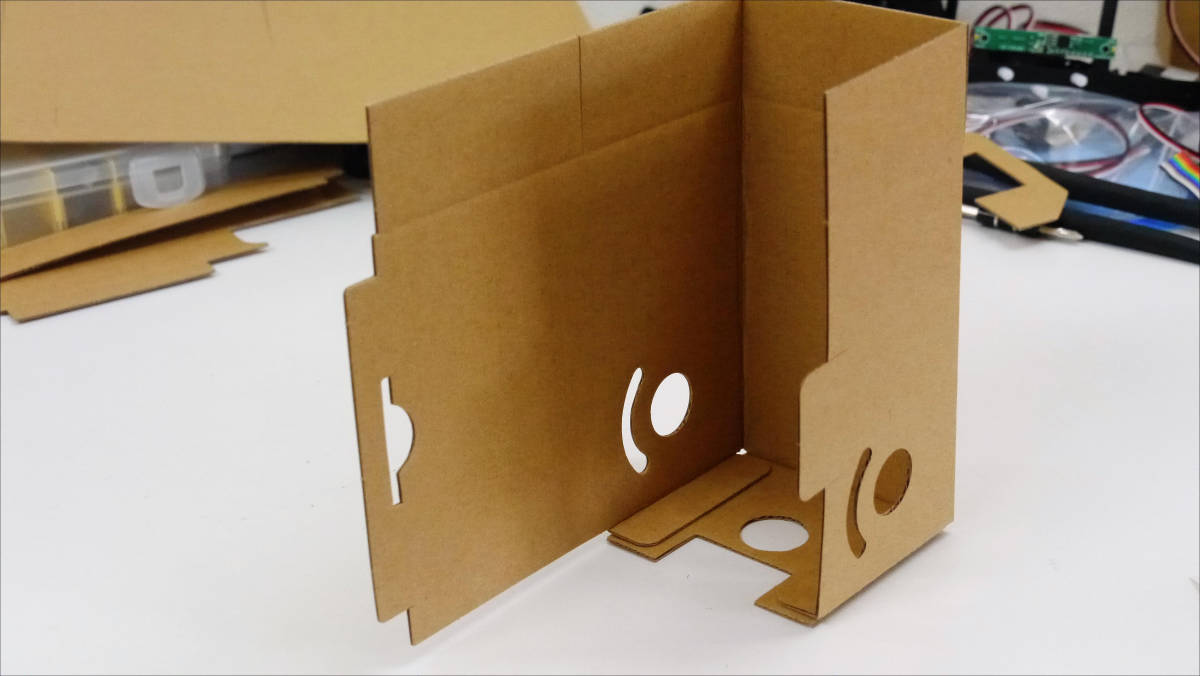
箱状に組立てます。
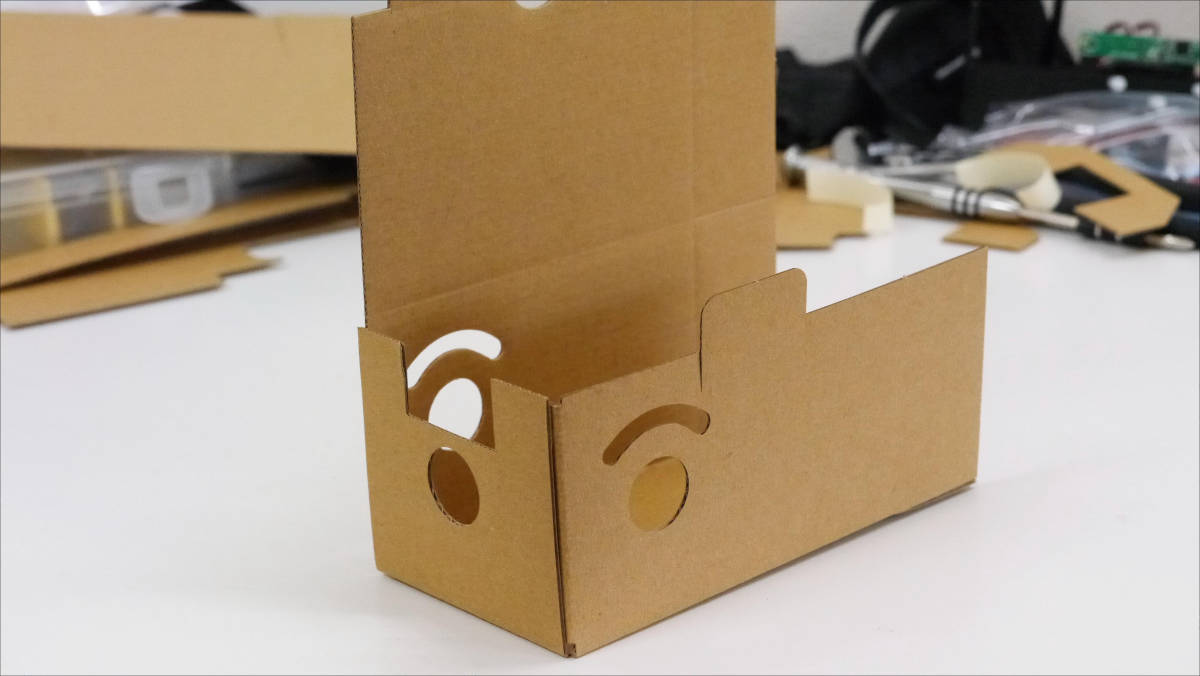
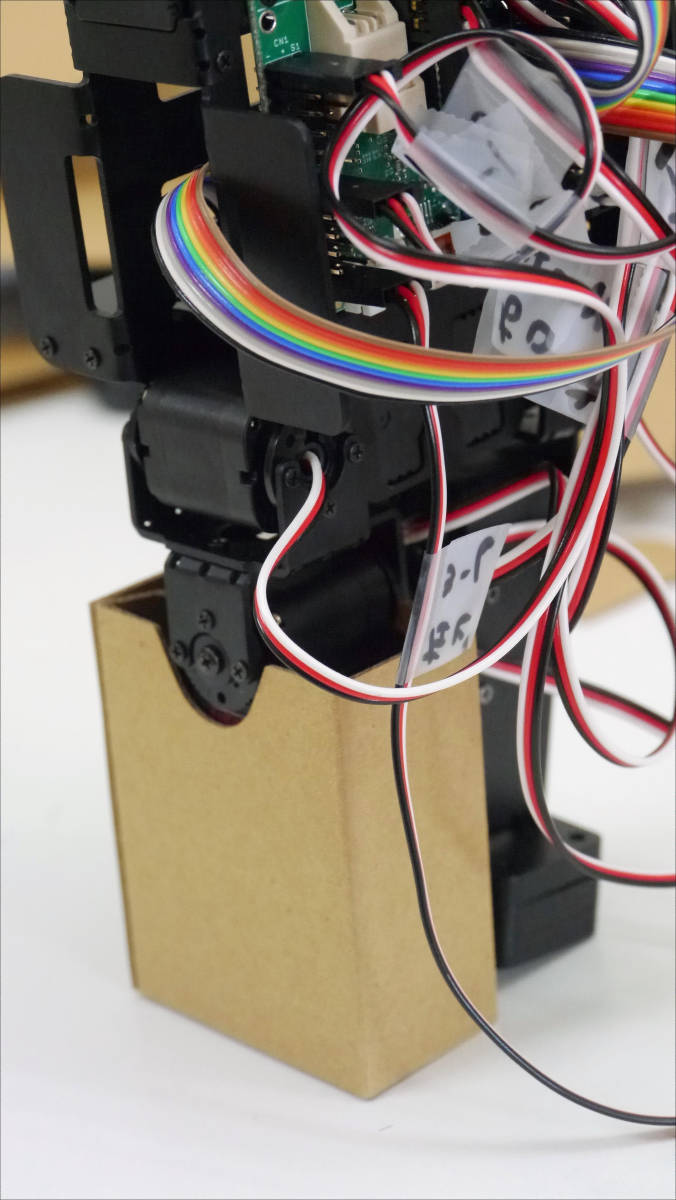
組み立てた箱は胴体前部から慎重に装着。
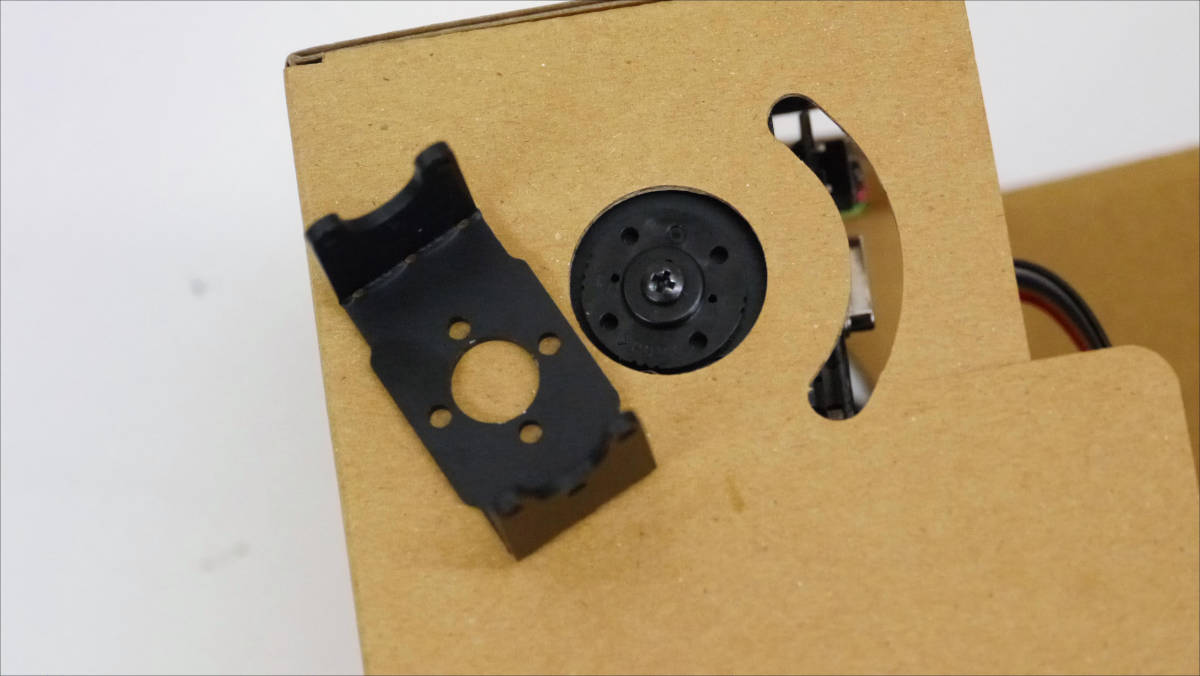
しっかりとサーボホーンが見えるように調整します。
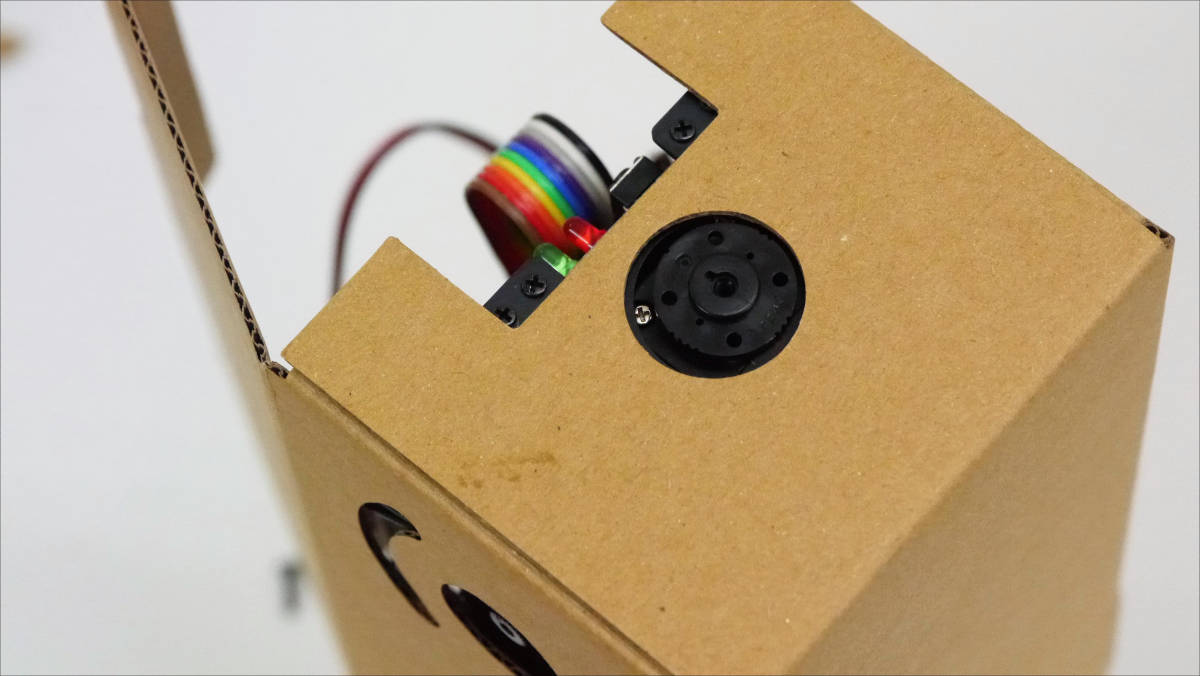
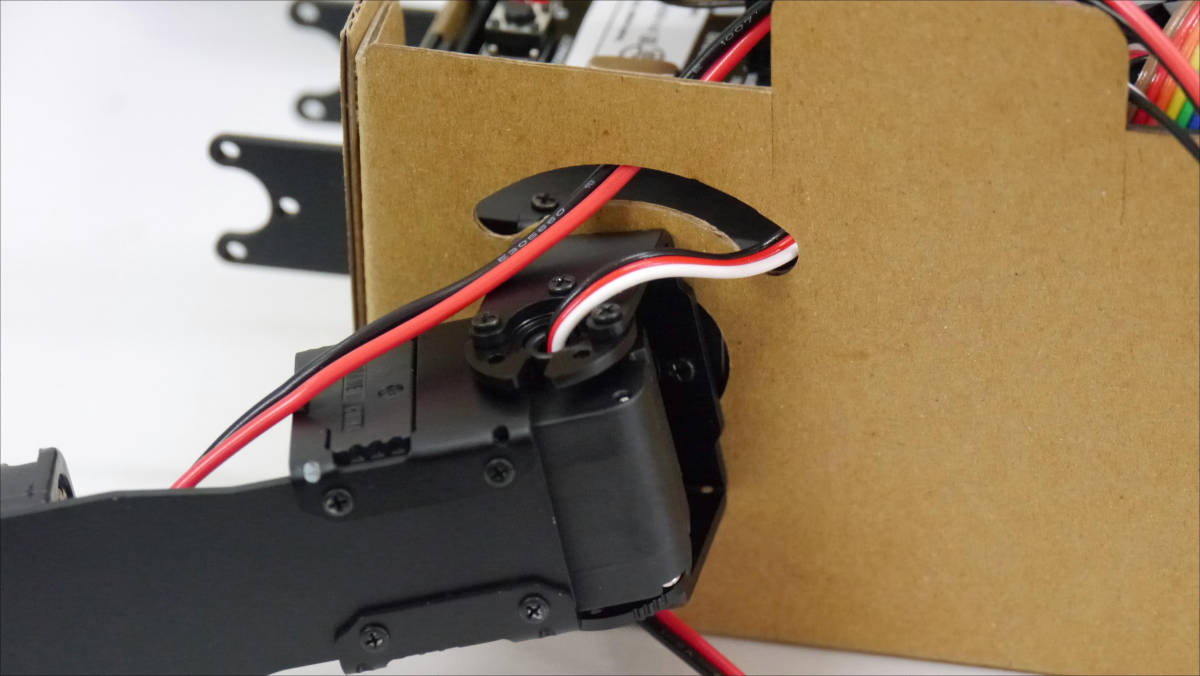
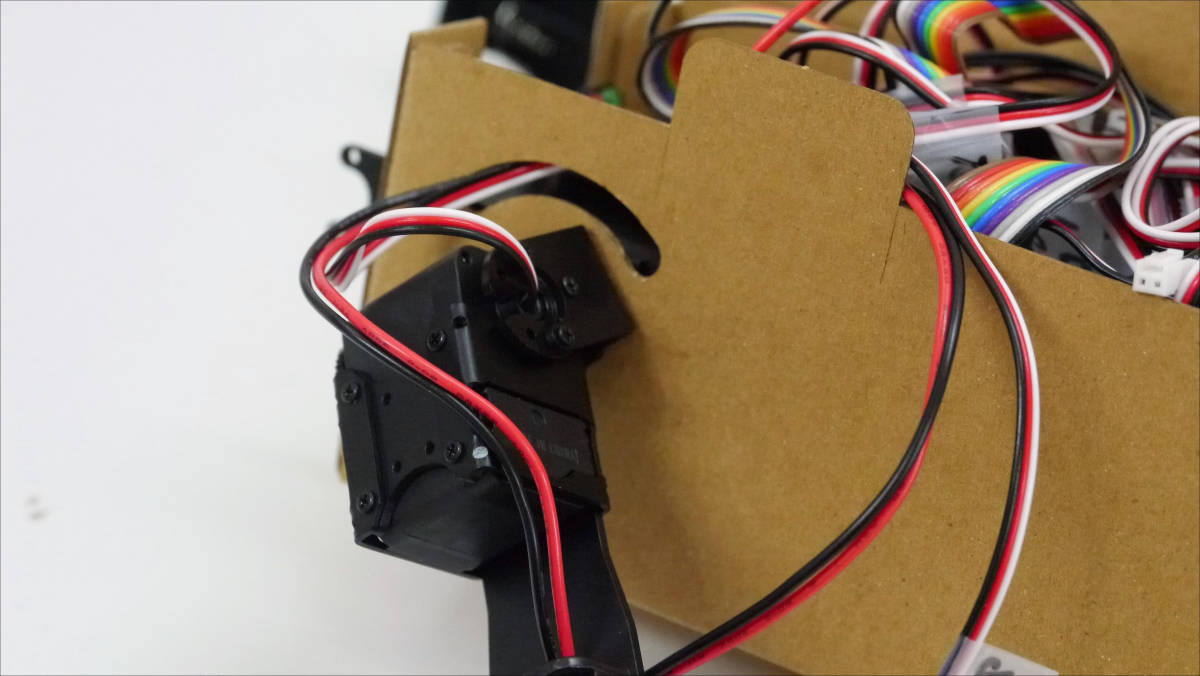
サーボにブラケットを装着。

腕部分のブラケットに……
腕を装着。
バンザーイ。
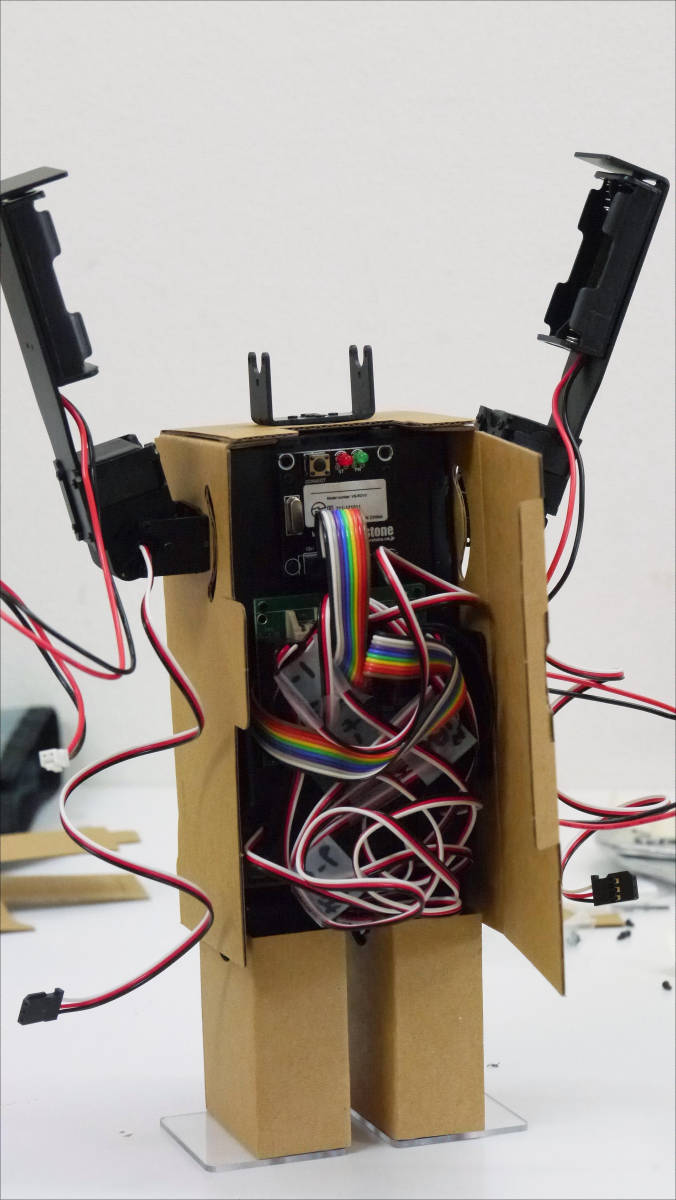
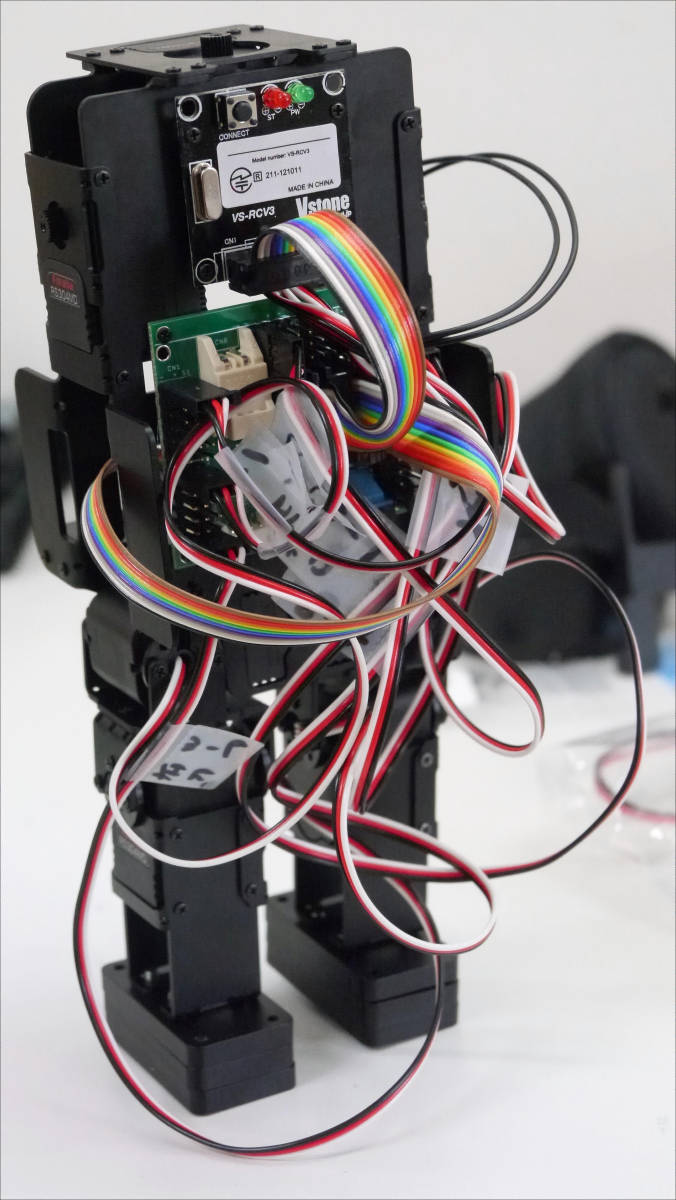
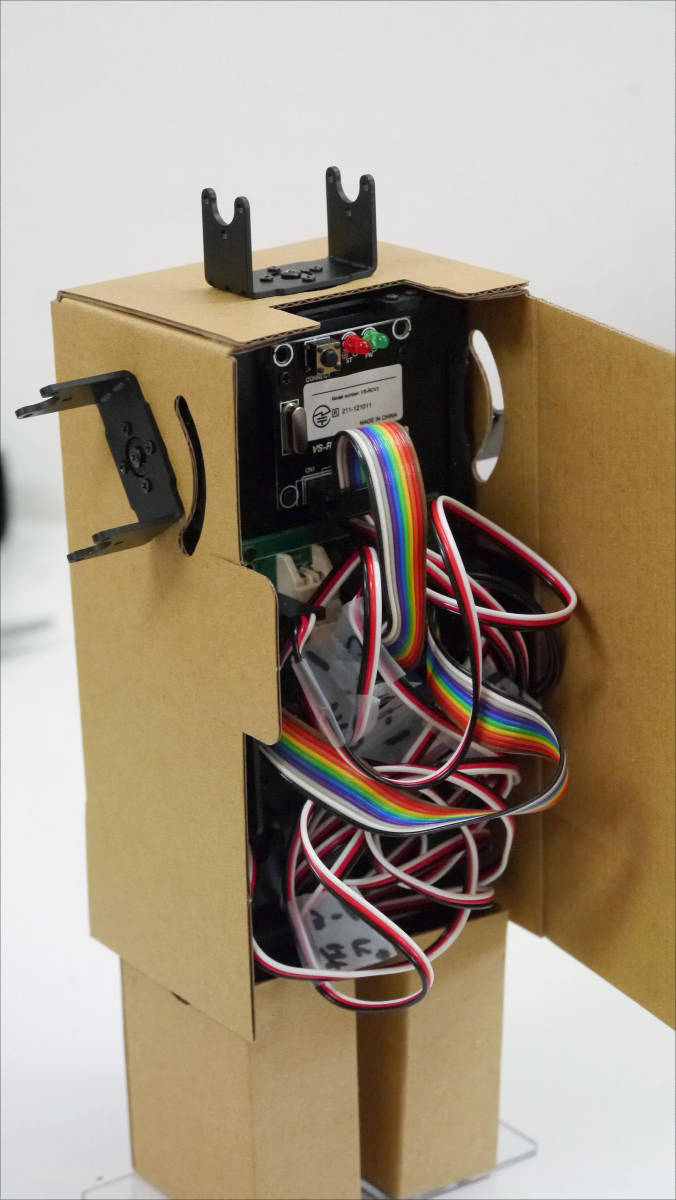
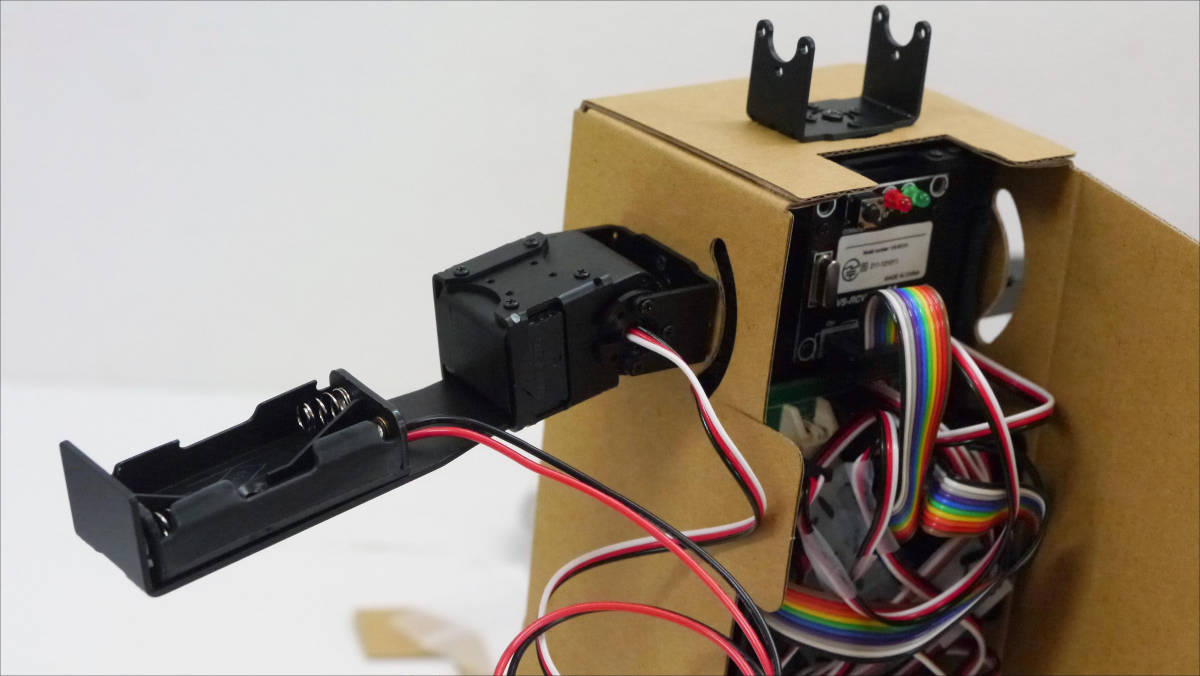
ケーブルは胴体のすき間に通して……
このように取り回します。
なお、説明書には両腕のサーボケーブル(CN1-6、CN2-6)の配線に関する記述がありませんが、下図の赤枠左にCN1-6を赤枠右にCN2-6を配線します。
続いて、先ほど作っておいた首部分を用意します。
ステーをつけたサーボのうらにフリーホーンをはめ込んでから……
胴体上部に首を装着。
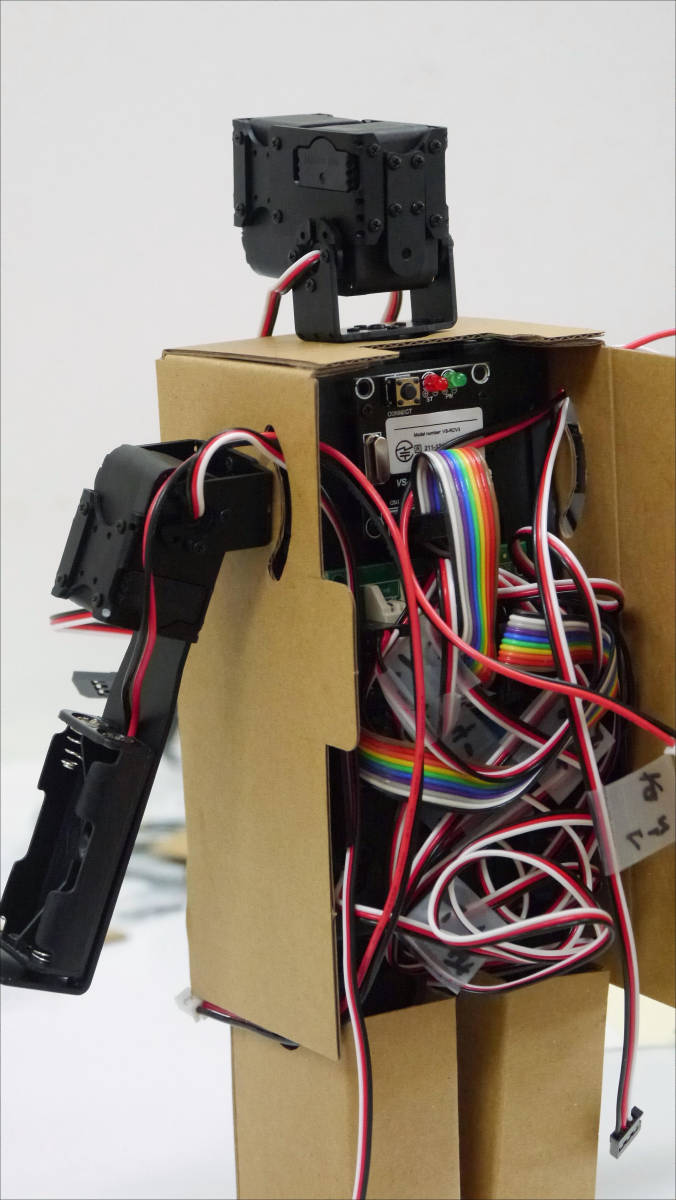
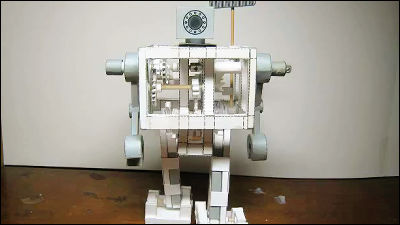
前からみるとこんな感じ。この時点ではかわいいどころか少々不気味です。
頭部分を首に装着。
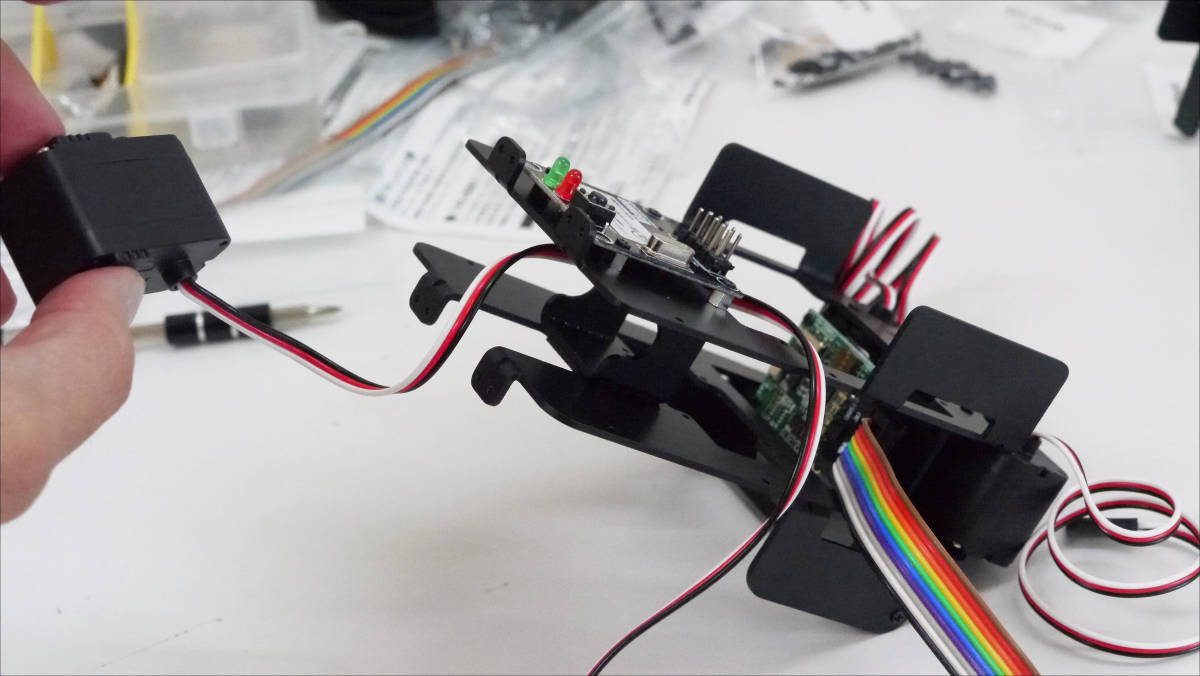
電池ボックスケーブル、スイッチケーブル、電源・LEDケーブルを各コネクタに差し込みます。
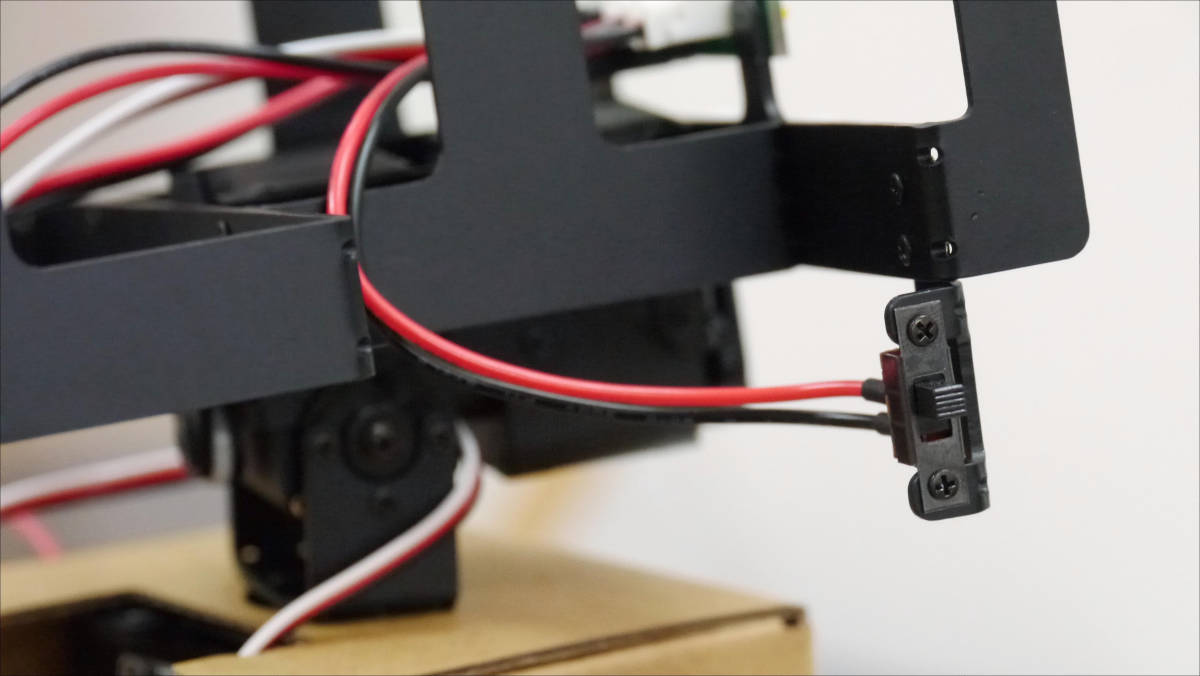
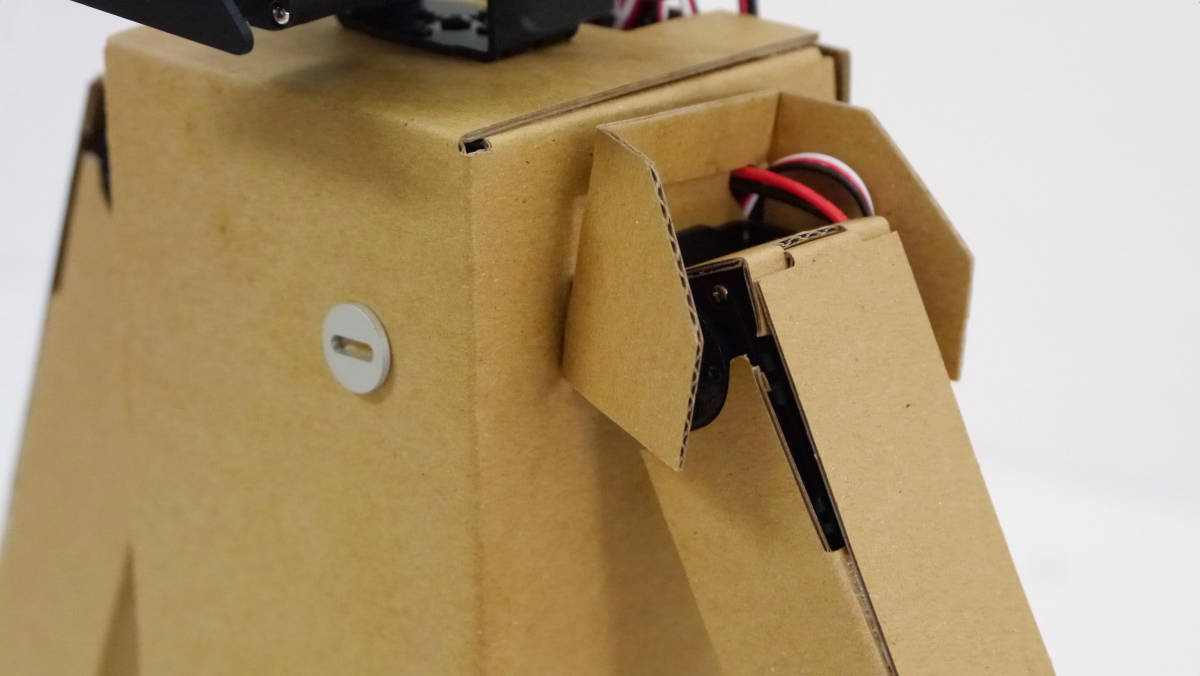
こちらは側面つけられた電源スイッチ。
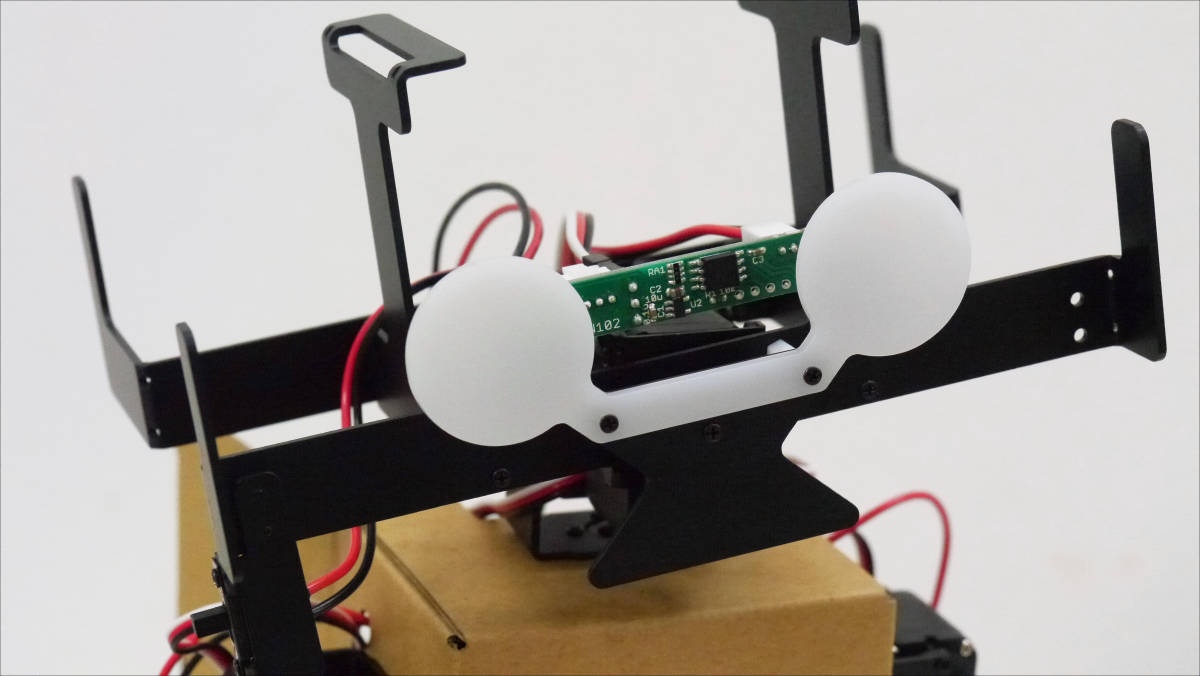
目スクリーンと口部分を装着。
ここで腕の外装を作ります。
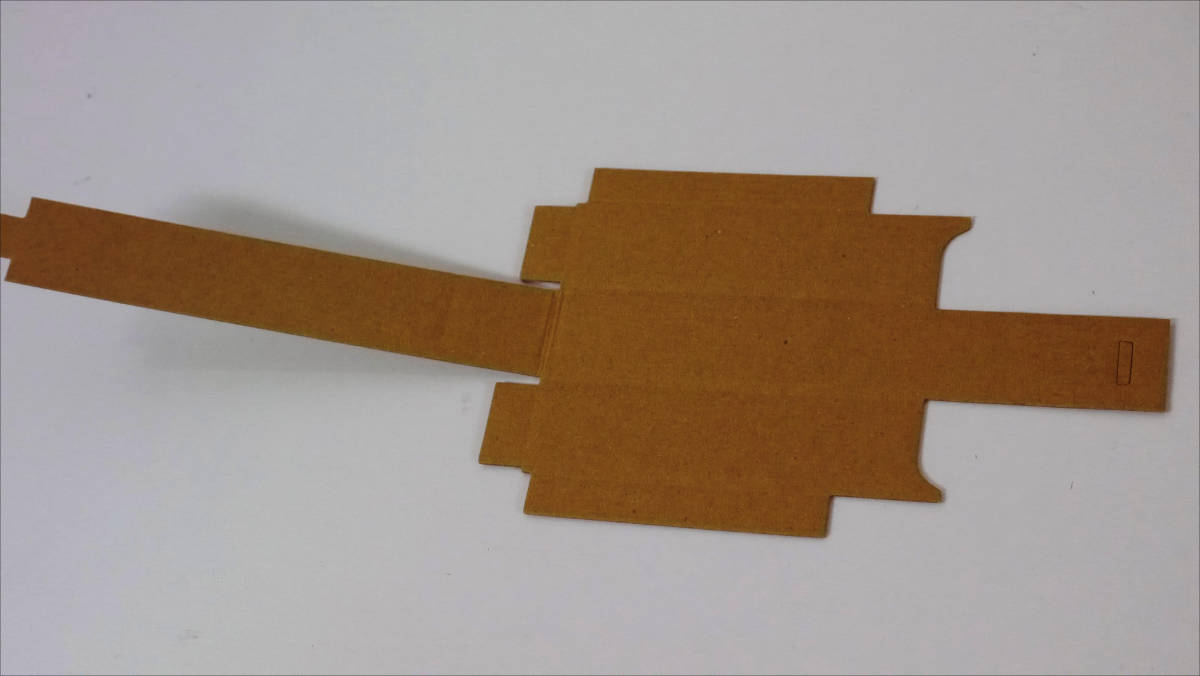
組み立てて箱にします。
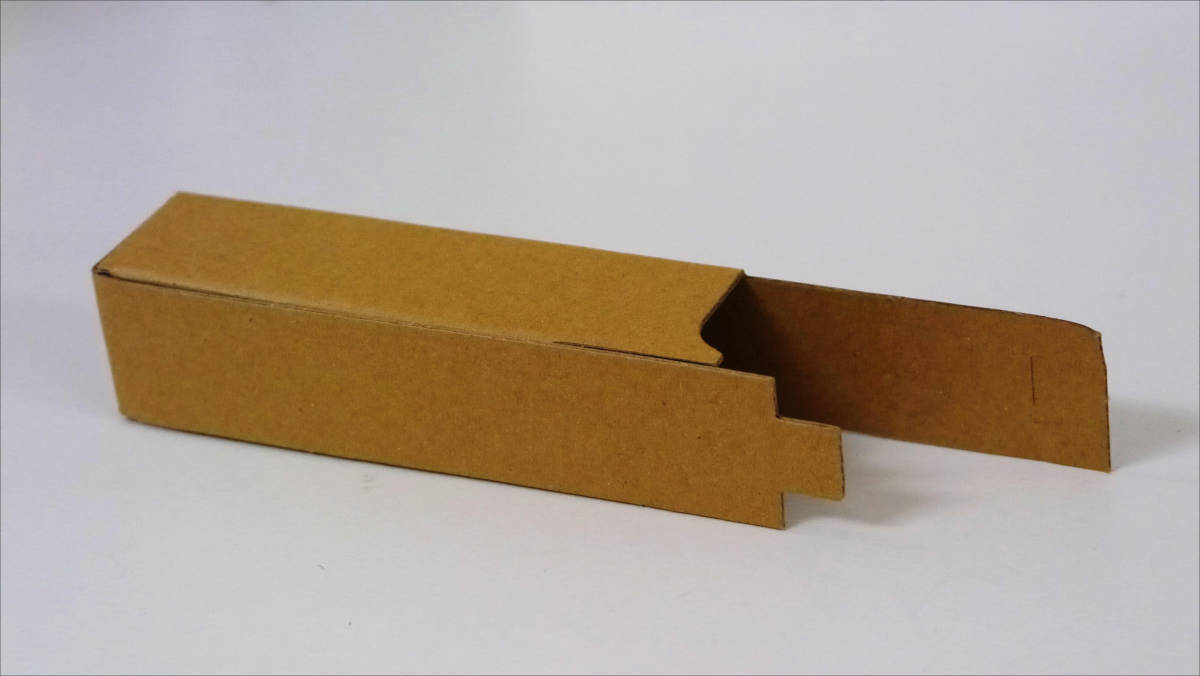
もちろん2本分作成。
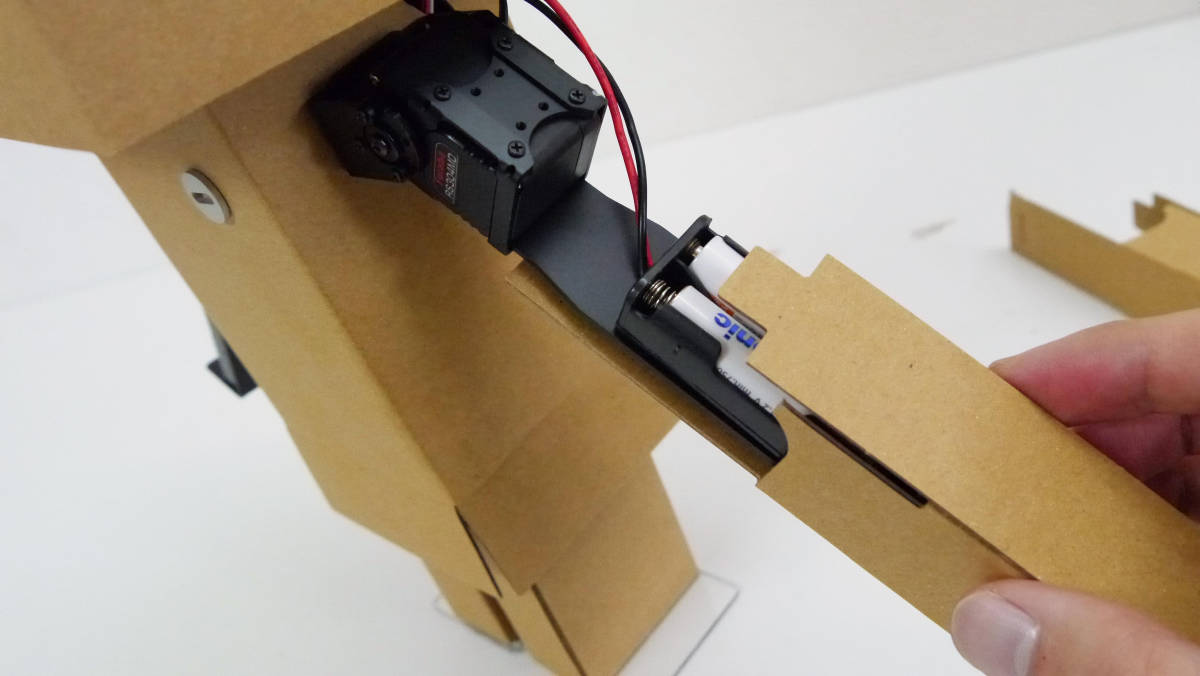
電池ホルダーに単4ニッケル水素電池を装着。ロボダンボーはニッケル水素電池指定なので注意が必要です。

外装を腕に装着します。
先端部分は折り返し……
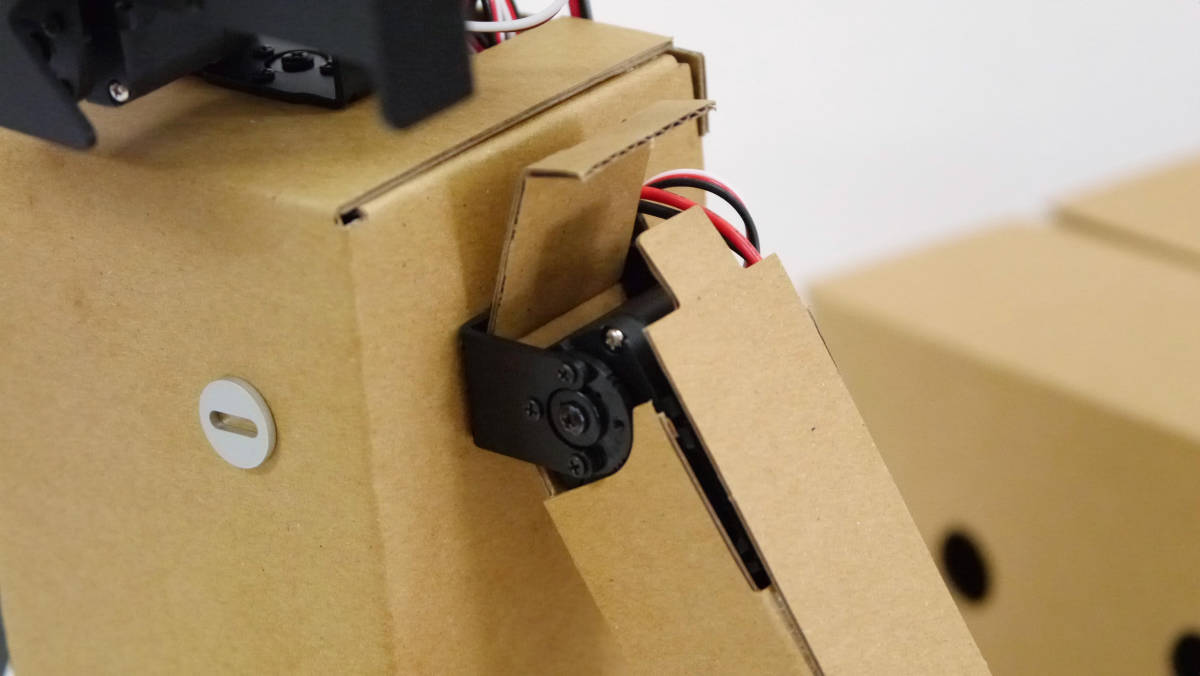
穴に差し込んで固定。

腕ができました。
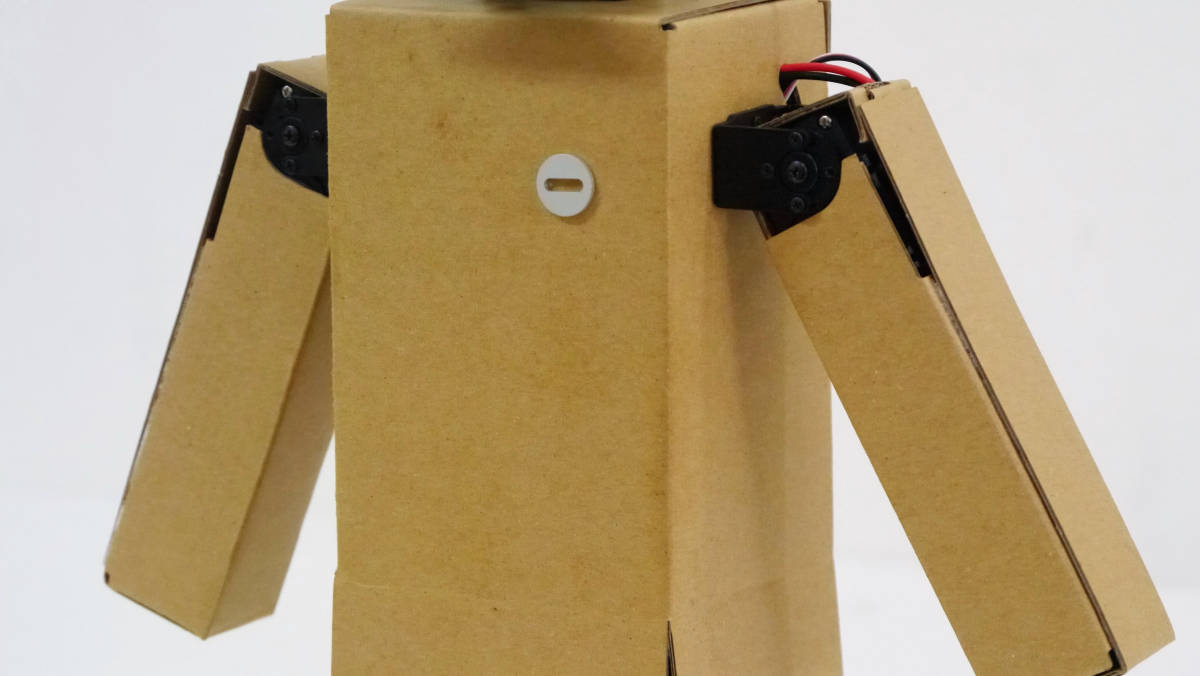
さらに肩のフレームを装着すれば両腕が完成。
何の変哲もないダンボールですが……
穴をくり抜くと見覚えのある顔が登場。
組み立てて箱にすると……
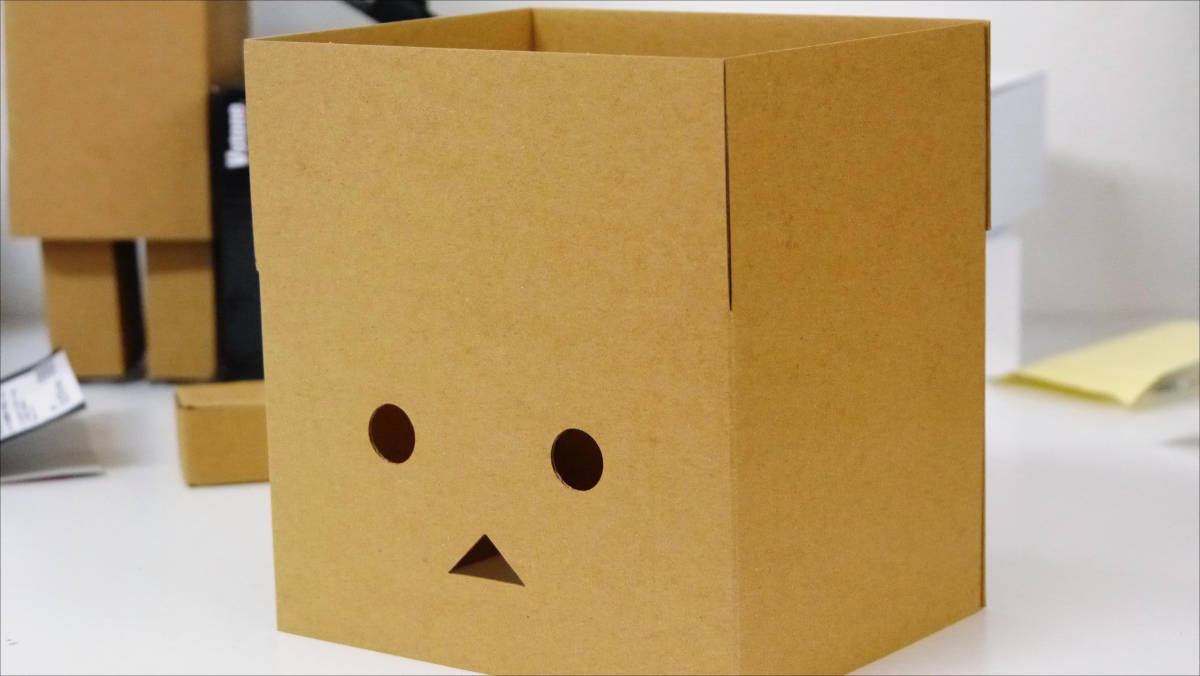

ダンボー!
頭部分に装着して……
完成!
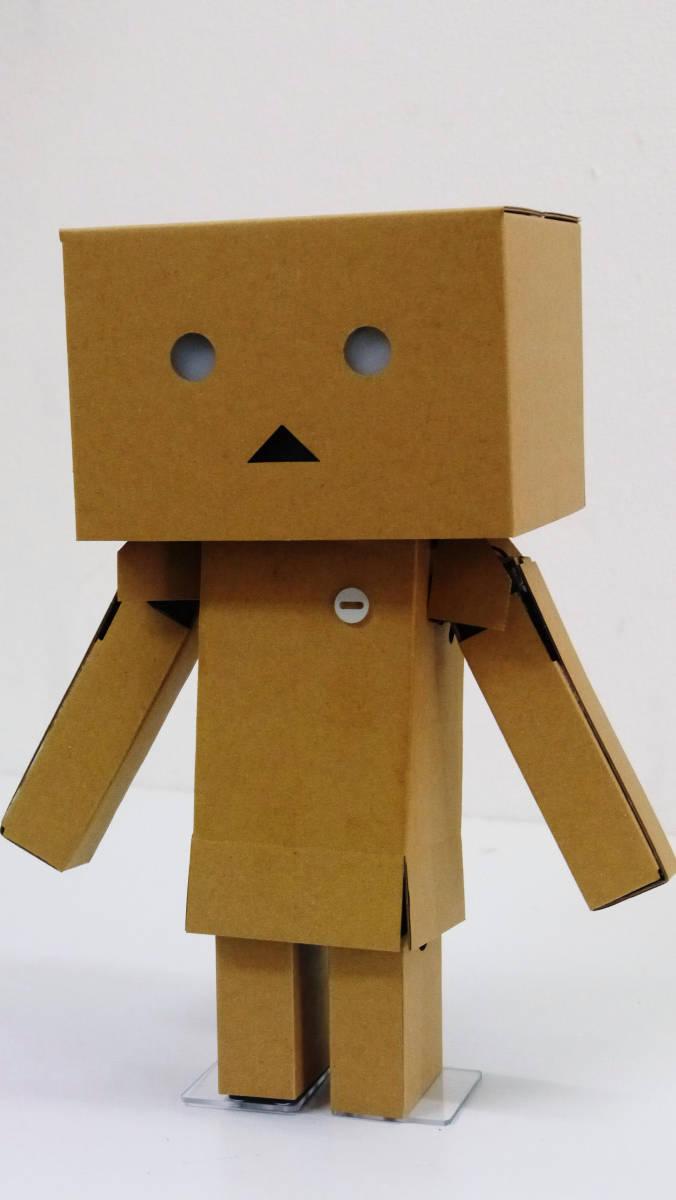
壁に寄りかかるロボダンボー。ダンスする日は近い!?
ロボダンボーは、ベース価格が7万9800円、無線コントローラー「VS-C3」(単体価格4410円)が付いた無線コントローラーセットが8万4210円、Bluetooth通信モジュール「VS-BT001」(単体価格8400円)が付いたBluetoothセットが8万8200円、ジャイロ/加速度センサーボード「VS-TX001」(単体価格1万8270円)と無線コントローラー「VS-C3」が付いたスペシャルセットが8万9460円となっています。
・つづき
「ロボダンボー」を調教していろいろな動きをさせてみました - GIGAZINE
・関連記事
売れすぎて生産が追いつかなくなったダンボーコラボモバイルバッテリー「cheero Power Plus DANBOARD version」フォトレビュー - GIGAZINE
ダンボー着ぐるみが目をビカビカ光らせて「イッショにシャシンを撮リマショウ…」 - GIGAZINE
あの「ダンボー」がフルアーマー可能バージョンになって完全立体化 - GIGAZINE
ダンボーとE.T.&ジョーズがコラボしたスピルバーグ公認CMムービー - GIGAZINE
ロボコップ/宇宙飛行士/スイカ/オスプレイなど、個性的なダンボーが集まった「ダンボー夏休みコンテスト」 - GIGAZINE
・関連コンテンツ




in ハードウェア, レビュー, Posted by darkhorse_log
You can read the machine translated English article I tried assembling "Robodanbo" that you ….