NVIDIA announces 'MotionBricks,' which generates over 350,000 different game and robot movements in real time.

NVIDIA's research team has announced MotionBricks , a motion generation framework for game animation and robot control. MotionBricks is said to handle over 350,000 motion skills on a single neural backbone, achieving a throughput of 15,000 FPS and a latency of 2 milliseconds.
MotionBricks: Scalable Real-Time Motions with Modular Latent Generative Models and Smart Primitives
MotionBricks is a technology presented as a SIGGRAPH 2026 paper accepted by ACM Transactions on Graphics. The research team includes researchers from NVIDIA, as well as researchers from ETH Zurich, Simon Fraser University, and the University of Texas at Austin.

In game and robot motion control, animation graphs are widely used to manage actions such as walking, running, crouching, and picking up objects as states, which then transition according to inputs and events. However, in large-scale games, states and transitions become extremely complex, and AAA titles like Assassin's Creed may deal with over 15,000 animations, 5,000 states, and up to 12 levels of nested graphs.
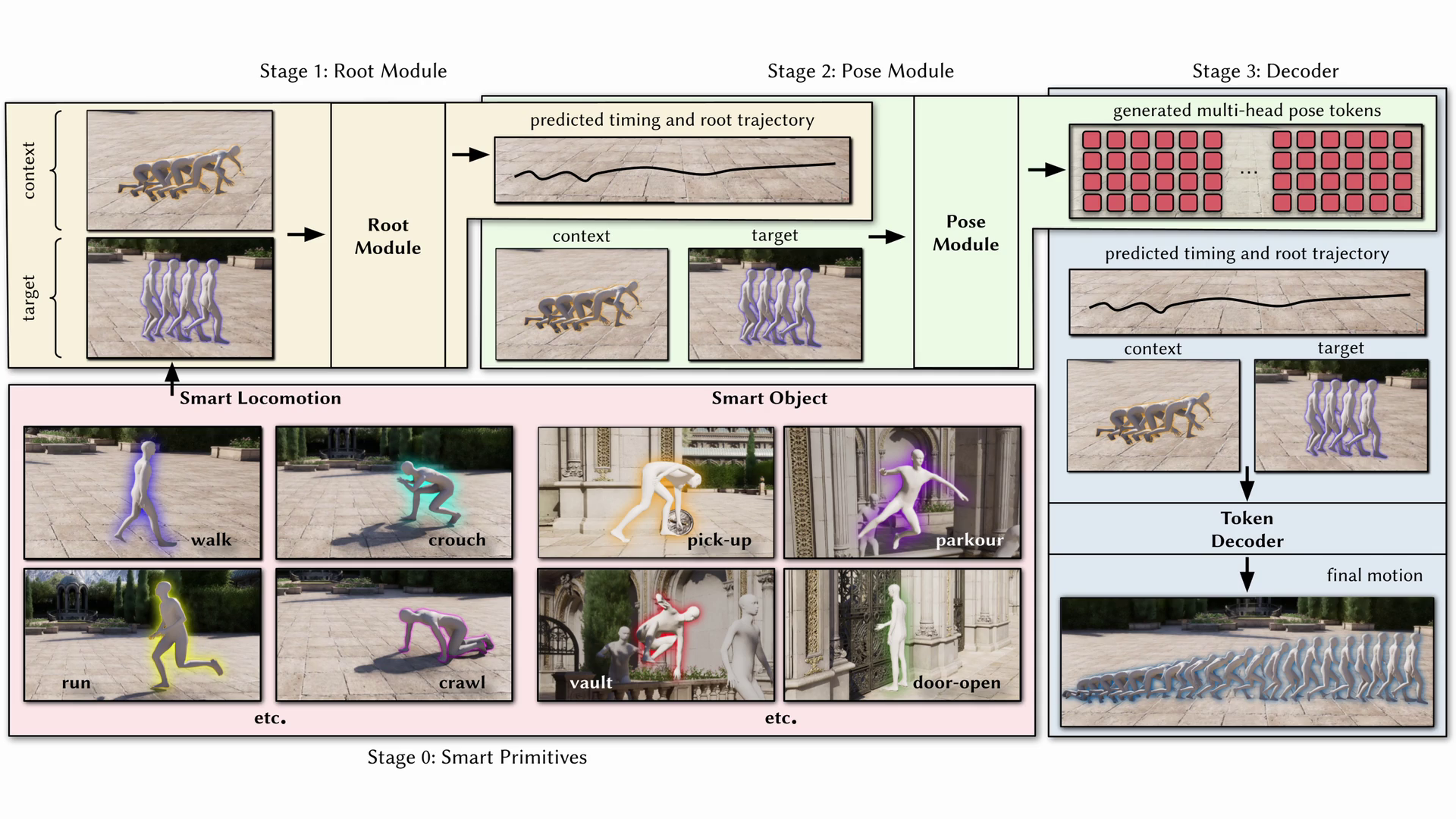
MotionBricks handles this complexity using units of interaction called 'smart primitives.' User speed, orientation, style settings, in-game events, etc., are converted into keyframes, and the neural backbone then step-by-step generates the timing, root trajectory, pose tokens, and final continuous motion.
The research team evaluated the data using their own large-scale motion capture dataset, as well as
MotionBricks is characterized by not requiring retraining or dedicated tagging for each downstream task. It is designed to handle tasks such as walking, crouching, running, crawling, picking up a sword, jumping over a bench, and opening a door by passing them as keyframe constraints to the same neural backbone.
The following video shows MotionBricks generating a continuous demo of movement, acrobatics, and object manipulation on Unreal Engine 5.
MotionBricks' lower-level operations are based on 'in-betweening,' which fills the gap between the start and target points of a motion. First, the root module predicts the number of frames required for the movement and the body's central trajectory. Next, the pose module predicts the distribution of pose tokens, and finally, the decoder outputs a continuous motion based on keyframes and trajectories.
At the higher level, the main components used are 'smart locomotion' for movement and 'smart object' for handling interactions with objects and scenes. Smart locomotion is a mechanism that creates natural movement from arbitrary speed, direction, and style specifications, and it can generate styles such as injured walking, zombie-like movements, skipping, and strafe (diagonal movement) from a single prompt in zero shots.
The following is a video showing how MotionBricks generates a zombie-like movement style.
Furthermore, the following video demonstrates 'Mixture of Styles,' which doesn't switch movement states based on input from a gamepad or keyboard, but rather continuously changes speed, direction, and walking style in accordance with commands during execution.
Smart Objects are a system that specifies interactions with scenes and objects as flexible proxy keyframes, with a neural backbone filling in the details from approach and contact to subsequent movement. You can see MotionBricks actually generating object interaction where a character picks up a sword in the video below. The research team reports that MotionBricks consistently showed good results in FID, MMD, jitter, keyframe accuracy, reach success rate, and human evaluation across various datasets, and achieved a throughput of 15,000 FPS by generating motion between keyframes with a latency of 2ms.
Below is a video comparing MotionBricks with six existing methods for generating intermediate frames that make up the space between keyframes.
MotionBricks is used not only for animation but also for full-body control in real-world environments with the Unitree G1 humanoid robot. The research team explained that one of its contributions is bridging the gap between virtual character animation and physical robot control, enabling unified motion synthesis across both domains.

Regarding the release of the code and data, an early preview version of the code is available on GitHub at the time of writing. This early preview version includes a lightweight MotionBricks-controlled Unitree G1 demo and a self-contained synthetic training pipeline that includes instructions for incorporating the BONES-SEED dataset.
However, MotionBricks as a whole is not yet publicly available in its entirety. The research team states that they aim for a full release around July 2026, including a model fully integrated into the GR00T Whole-Body Control robot control framework and a complete training pipeline, and that experiments to verify reproducibility are currently underway.
Related Posts: