Japanese researchers develop model to predict success rate of tomato harvest by robot

As the labor shortage in the agricultural sector worsens and
Realizing an intelligent agricultural robot: An analysis of the ease of tomato harvesting - ScienceDirect
https://www.sciencedirect.com/science/article/pii/S2772375525007695

Robots determine the ease of harvesting tomatoes? New technology developed to visualize the probability of successful harvesting | Osaka Public University
https://www.omu.ac.jp/info/research_news/entry-20534.html
RoboCrop: Teaching robots how to pick tomatoes
https://phys.org/news/2025-12-robocrop-robots-tomatoes.html
There is a growing need for automated harvesting using robots in the agricultural sector, but some crops are difficult to harvest automatically with robots. In particular, crops such as tomatoes, which grow in clusters, require advanced decision-making and control capabilities, as they must determine which fruits to harvest and which to leave depending on their ripeness, and take into account the structures around the fruit.
Fujinaga therefore constructed a model that uses image recognition and statistical analysis to quantitatively evaluate which direction a tomato-harvesting robot should approach from—left, front, or right—to increase the success rate of fruit harvesting.
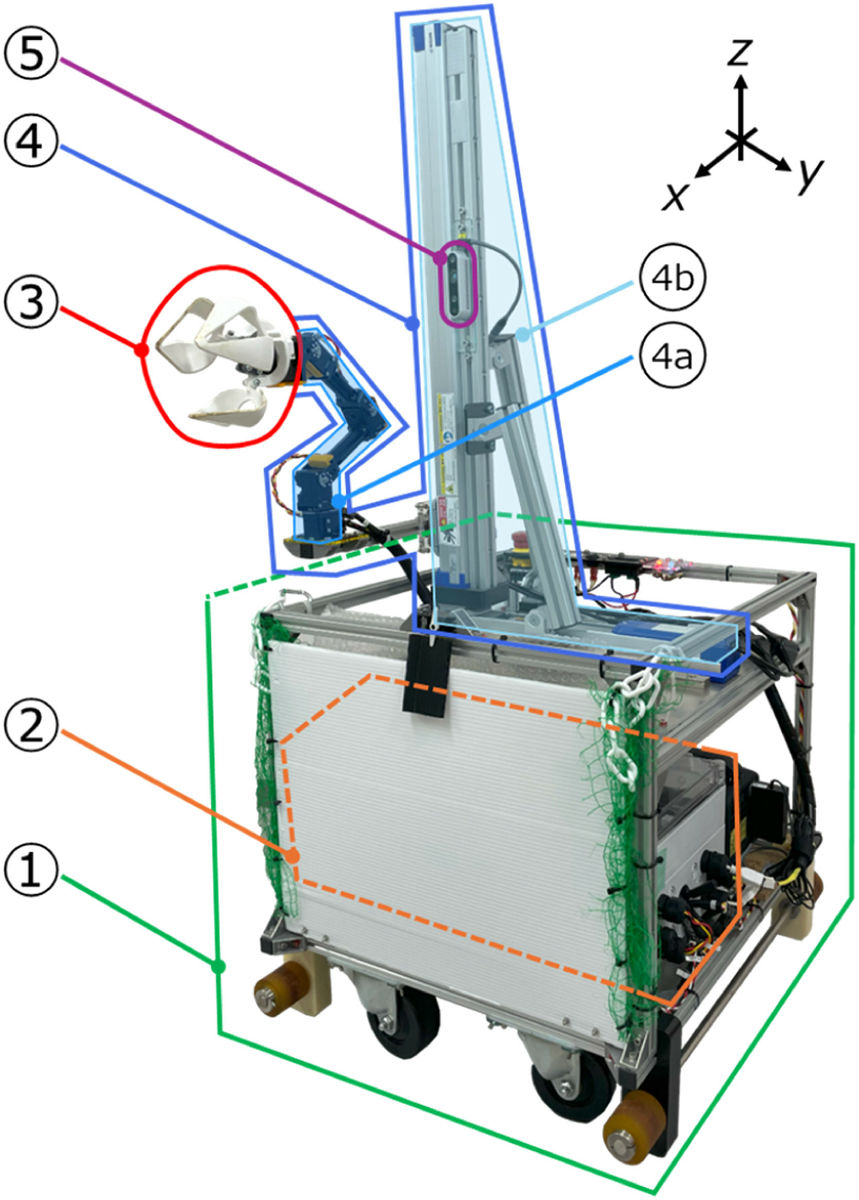
The tomato-harvesting robot used in the study was able to move along rails installed in a greenhouse plant factory, and was equipped with two linear arms and four flexible arms with joints. The end of each arm had a device with three fingers that could grasp tomatoes, and it was also equipped with a camera that could capture images of the tomatoes and their surroundings.
In the photo below, you can see that there are rows of tomatoes to be harvested on both sides, and a rail (center) along which the robot can move is laid in the middle.

In an experiment using a robot to harvest 100 tomatoes, 81 were successfully harvested: 56 were harvested from the front, 16 from the right, and 9 from the left, demonstrating that approaching the fruit from both sides increases the harvesting success rate.
Based on the data obtained from the experiment, Fujinaga quantitatively analyzed trends such as 'failure is more likely when there is an obstacle in front of the tomato' and 'success is more likely when there is a stalk on the tomato.' Furthermore, using a statistical method called logistic regression , he built a model to predict harvest success rates based on data extracted from the images.
The new model is expected to enable the robot to selectively harvest tomatoes more reliably. Fujinaga claims that this model shifts from the conventional 'detection/recognition' model to 'harvesting ease estimation.' He explains, 'This goes beyond simply asking 'Can a robot harvest tomatoes?' to considering 'What is the probability of successful harvesting?' This is a more meaningful question for real-world agriculture.'
Related Posts:







in Science, Posted by log1h_ik