The founder of a Roomba development company explains why developing a humanoid robot is difficult, and tactile sensations are essential for dexterous robots, so wheels may become the norm rather than bipedal walking.

The development of humanoid robots is progressing at a rapid pace, with some companies claiming that 'humanoid robots will be practical and capable of performing the same tasks as humans within a few years.' However, Rodney Brooks, a leading robotics expert and co-founder of iRobot, the company that developed the Roomba, argues that 'the development of humanoid robots is still a long way off,' and explains his reasoning in a blog post.
Why Today’s Humanoids Won’t Learn Dexterity – Rodney Brooks
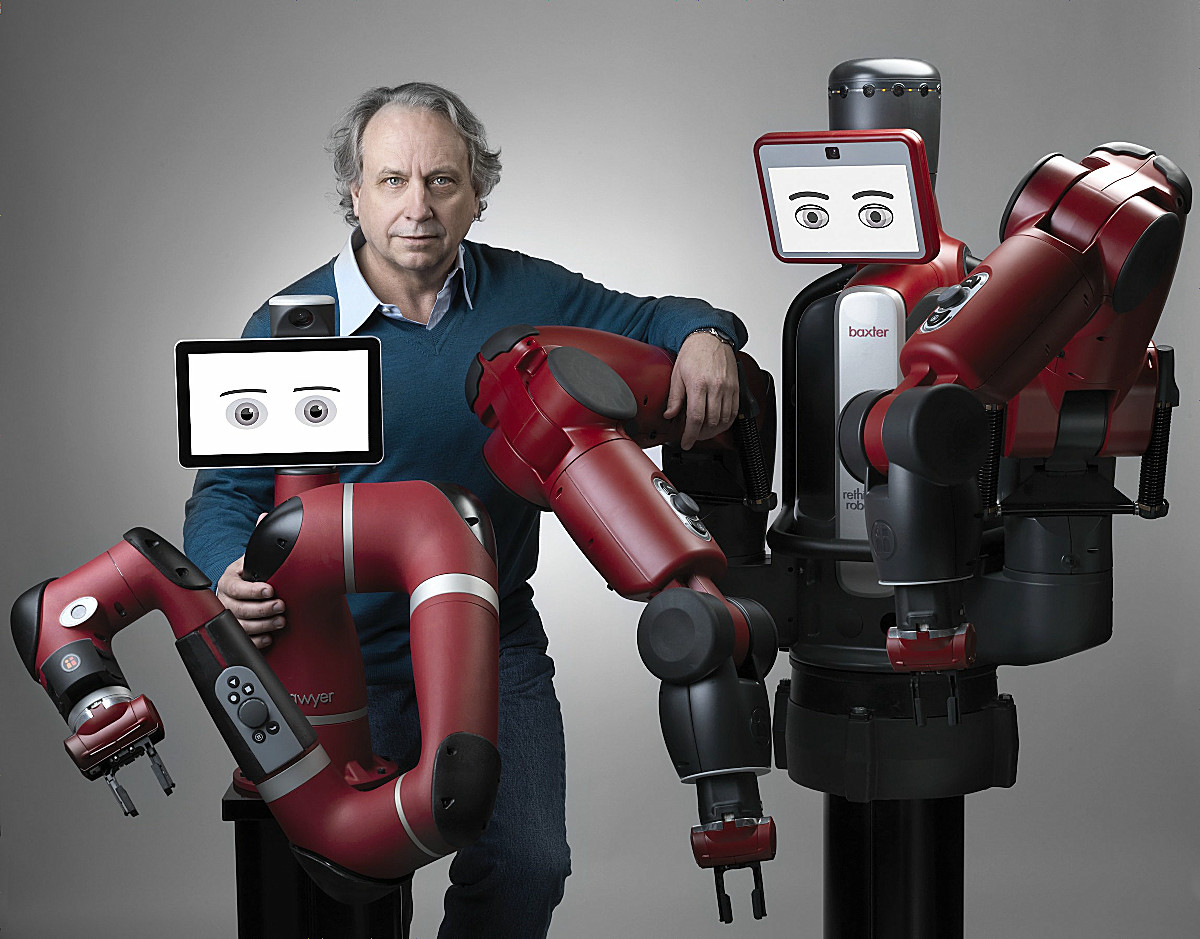
Brooks is a leading figure in robotics, famous for advocating ' Subsumption Architecture, ' one of the robot development architectures, and is also a co-founder of robotics companies such as iRobot and Rethink Robotics. Below is a photo of Brooks with Rethink Robotics' robots 'Sawyer' (left) and 'Baxter' (right).
Brooke is skeptical of the idea that humanoid robots will replace humans in work in the next few years, arguing that it will take more than 10 years for humanoid robots to be put to practical use.
Tesla and other companies developing humanoid robots are currently using an approach of developing AI to control robots based on video data of human movements. However, Brooke says this approach is extremely difficult. The main reason is that there is no established method for accurately capturing tactile sensations.
A major factor in humans being able to perform precise movements is 'tactile feedback.' The importance of tactile sensation can be clearly seen by watching the two videos below, which record an experiment in which a person lights a match under normal and limited tactile conditions. In the first video, under normal conditions, the person picks up a matchstick on the table with one hand and rubs it against a matchbox placed on the table to light it.
In the second video, the robot performs the same task while the sensation in its fingers is restricted by anesthesia. Playing back the video reveals that the loss of tactile feedback makes every video more difficult. Humanoid robot developers like Tesla have adopted the approach of developing AI for their robots based on recorded human movements. However, achieving human-level precision requires not just learning how humans move, but also how they respond to touch.
2S Match Anest2 - YouTube
Image recognition models and large-scale language models that are already in practical use use information such as 'images' and 'text' as training data. While image recognition models are developed using 'systems that mimic the way the human brain recognizes images,' and large-scale language models are developed using 'systems that mimic the way the human brain recognizes language, such as tokenization,' a similar system for tactile perception has not yet been established.
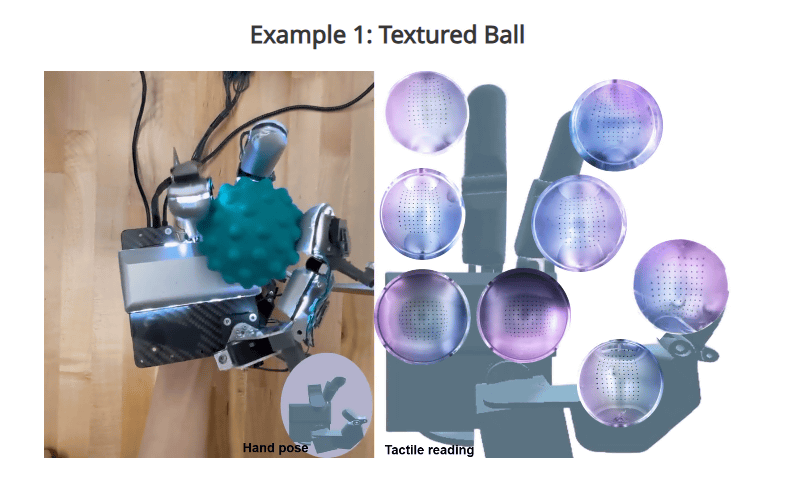
However, this does not mean that research into touch has not progressed at all. For example, a research team led by the Massachusetts Institute of Technology has developed a device called ' DEXOP ' that can be worn on the hand and record finger movements and touch sensations by performing various actions.
Furthermore, humanoid robots will also be required to perform tasks that require contact with humans, such as in nursing care, but safety is currently an issue. The energy required for walking varies depending on the size of the robot, and if a human-sized humanoid robot accidentally kicks a human, it could lead to a serious accident. Brook cites the example of 'the 'flying car' concept, which was originally envisioned as a car that could both drive on roads and fly in the sky, but at present, the term 'flying car' has come to refer to a vertical take-off aircraft that cannot travel on the ground,' and points out that 'humanoid robots will likely be equipped with wheels rather than human-like legs.'
Brook also said, 'Big tech companies and venture capitalists are investing huge amounts of money in developing humanoid robots, but if they gave 20% of that investment to university researchers, they would get there faster.'
Related Posts:





in Hardware, Posted by log1o_hf