Introducing CARA, a robot dog that uses ropes instead of gears to move

YouTuber Aaed Musa, who makes his own robots and gadgets, has developed a robot dog called CARA that uses ropes instead of gears to drive it. You can see how CARA is being developed and how the four-legged robot dog actually moves in a video posted on Musa's YouTube channel.
CARA — Aaed Musa
High Precision Robot Dog Using Rope - YouTube
Behind Musa is the robot dog CARA.

The most distinctive feature of CARA is that it does not use gears or

The name CARA is an acronym for 'Capstans Are Really Awesome.'

About a year ago, Musa began work on a 'capstan drive,'
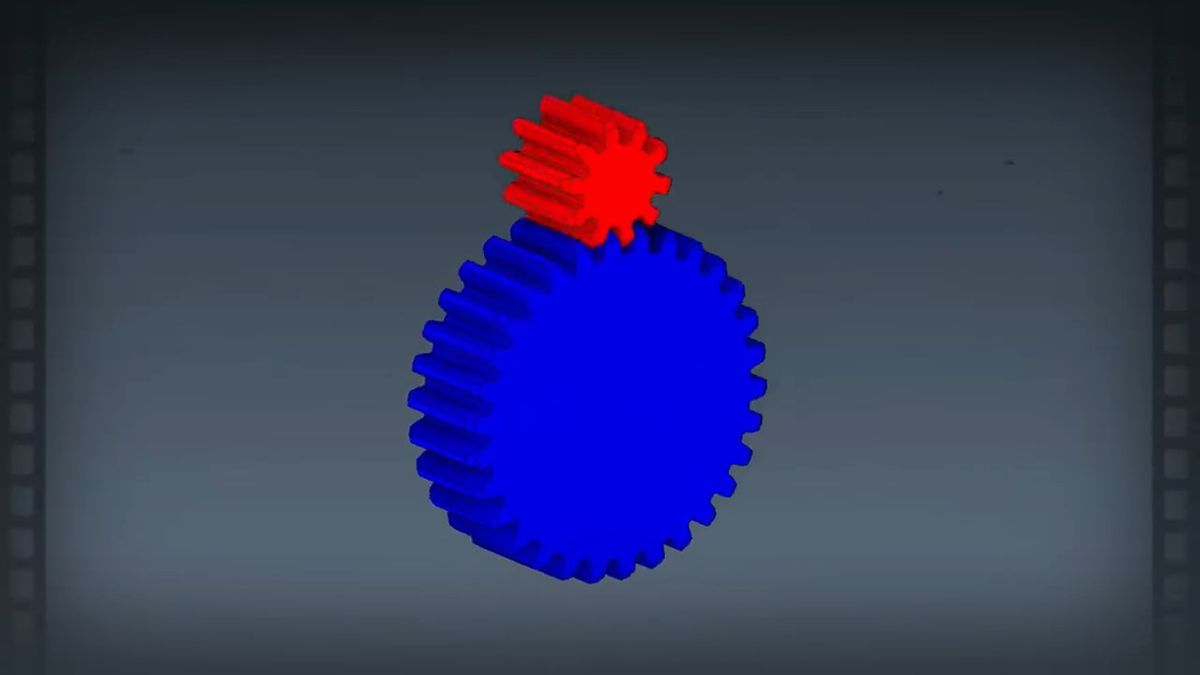
A typical reducer using gears looks like this. By meshing the gears, you can gain torque in exchange for reducing the rotational speed.
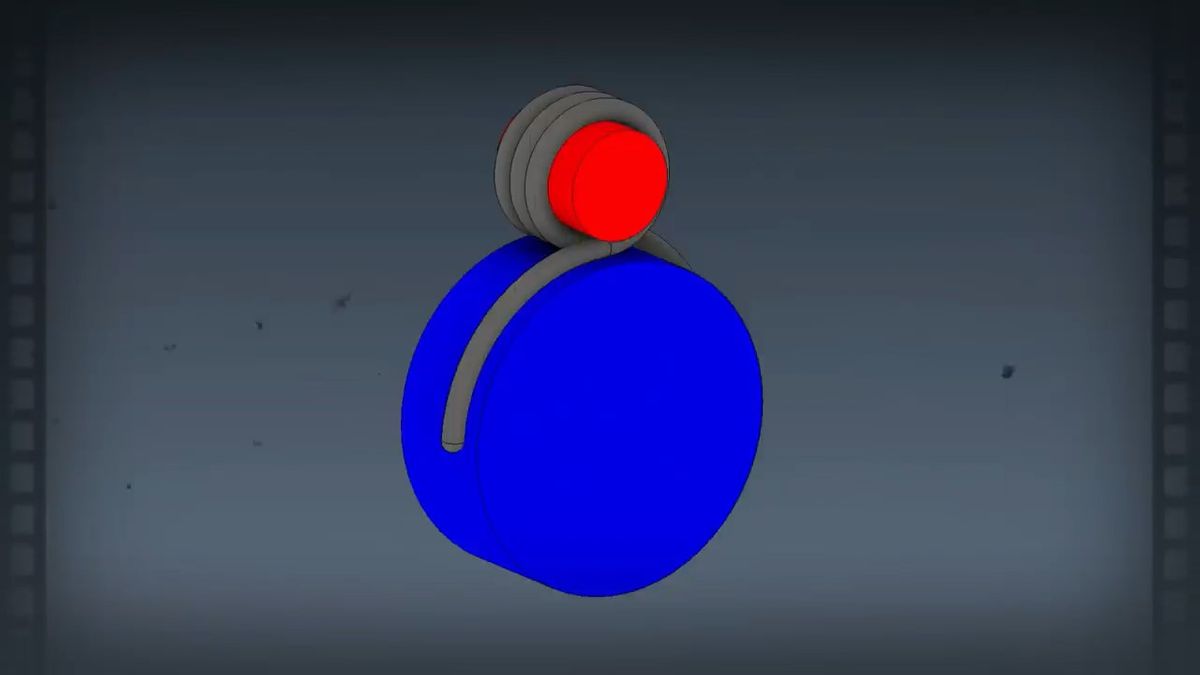
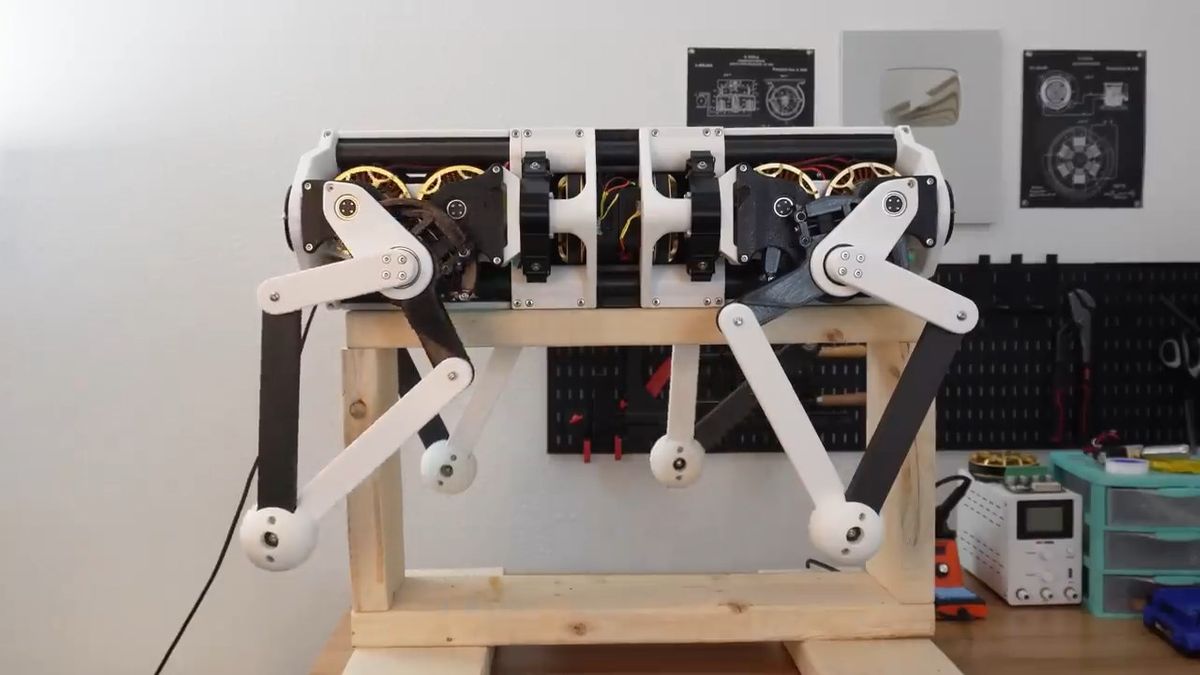
A capstan drive is a reducer that does not have gears; only the drum parts are in contact and torque is transmitted through a rope wrapped around two drums.
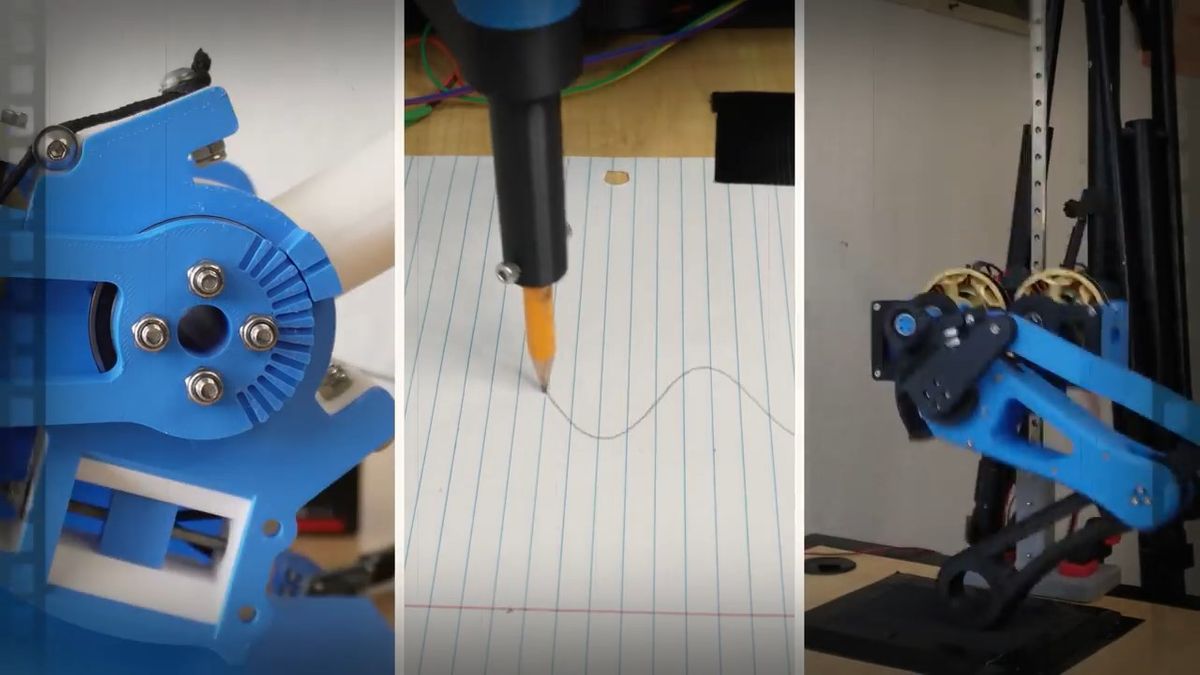
The capstan drive that Musa actually made looks like this.
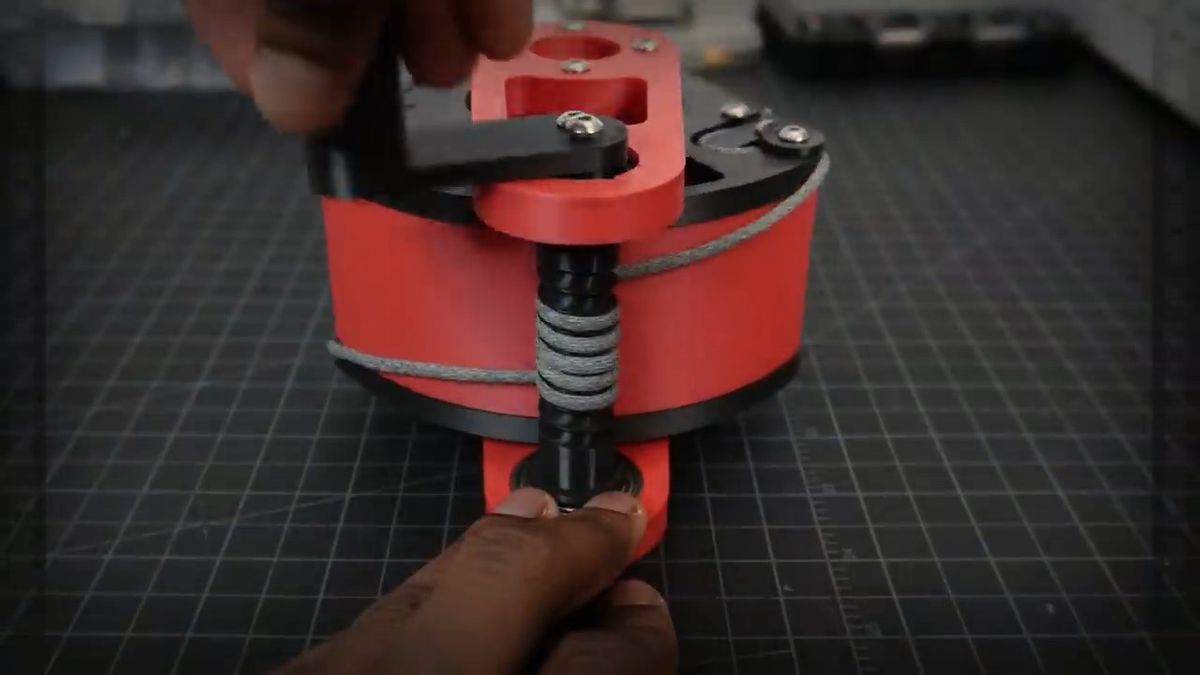
The rope wrapped around the drum is a special rope called

This results in virtually zero play, allowing for extremely precise power transmission. Musa argues that the low noise and low cost of capstan drives make them a good choice for robotics.
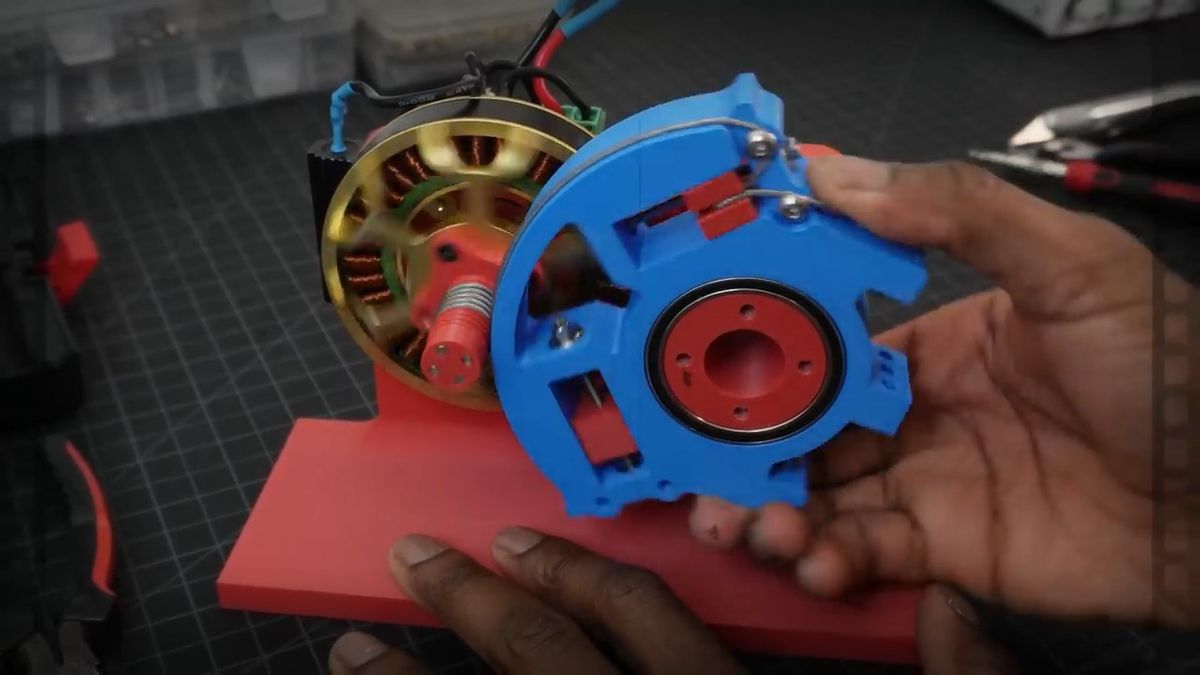
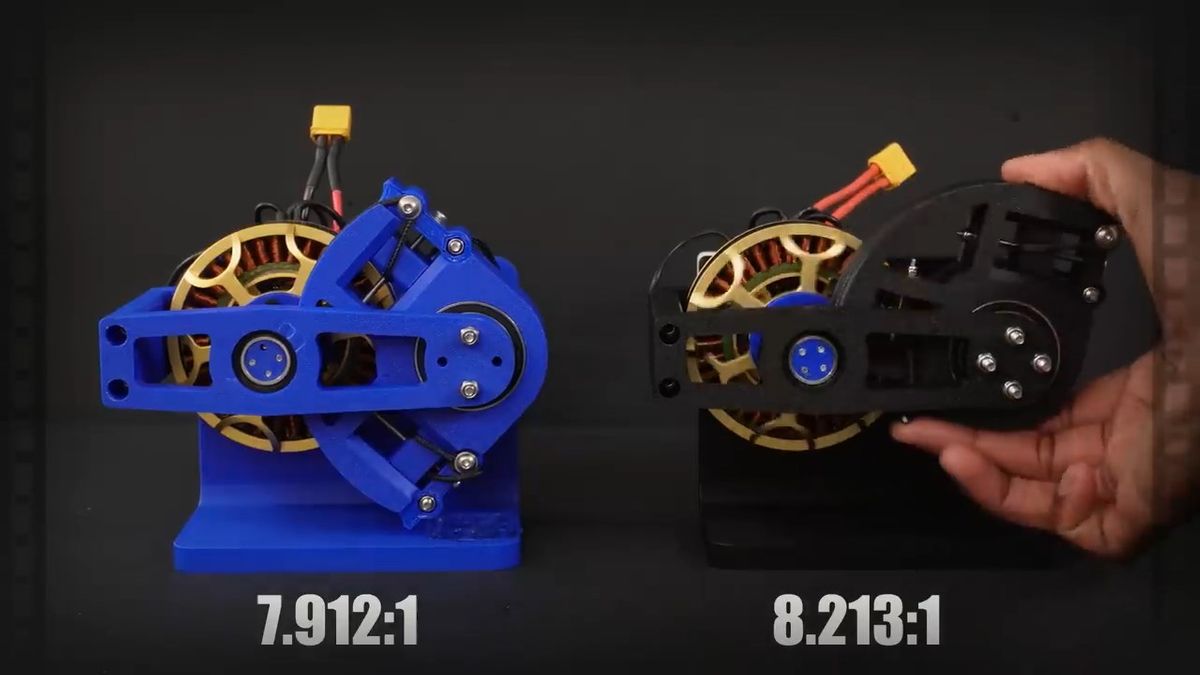
This time, Musa decided to use this capstan drive to create a robot dog. First, he designed a capstan drive with a gear ratio as close to 8:1 as possible, taking into account the diameter of the drum as well as the diameter of the rope.
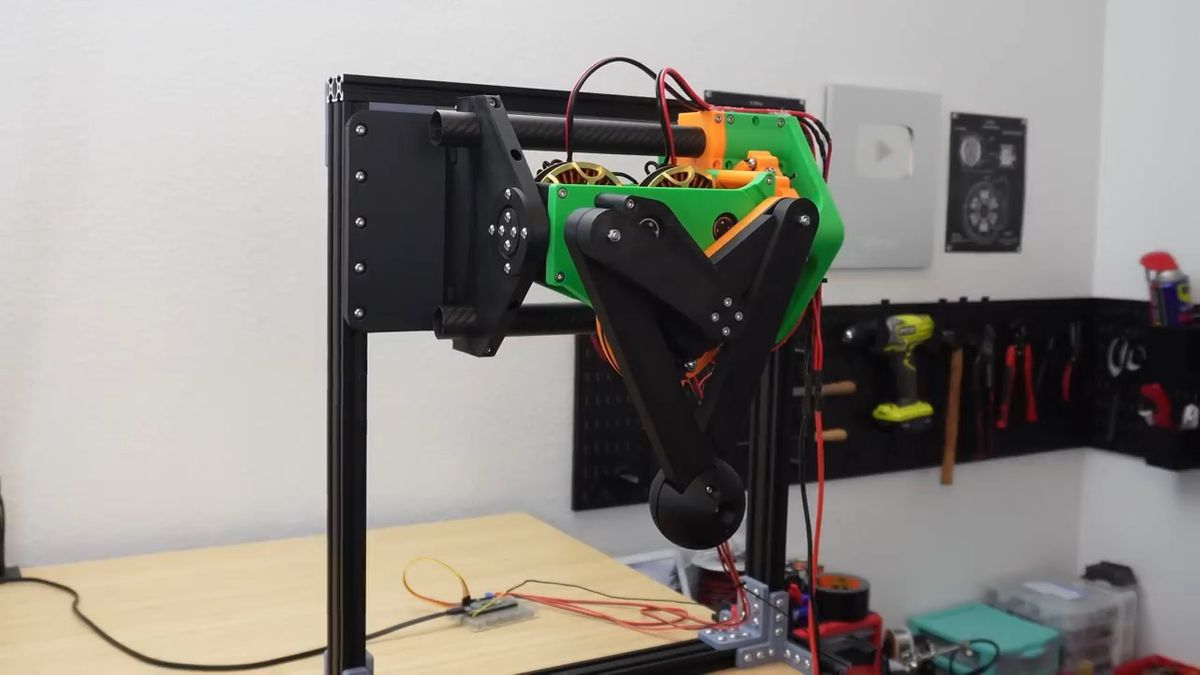
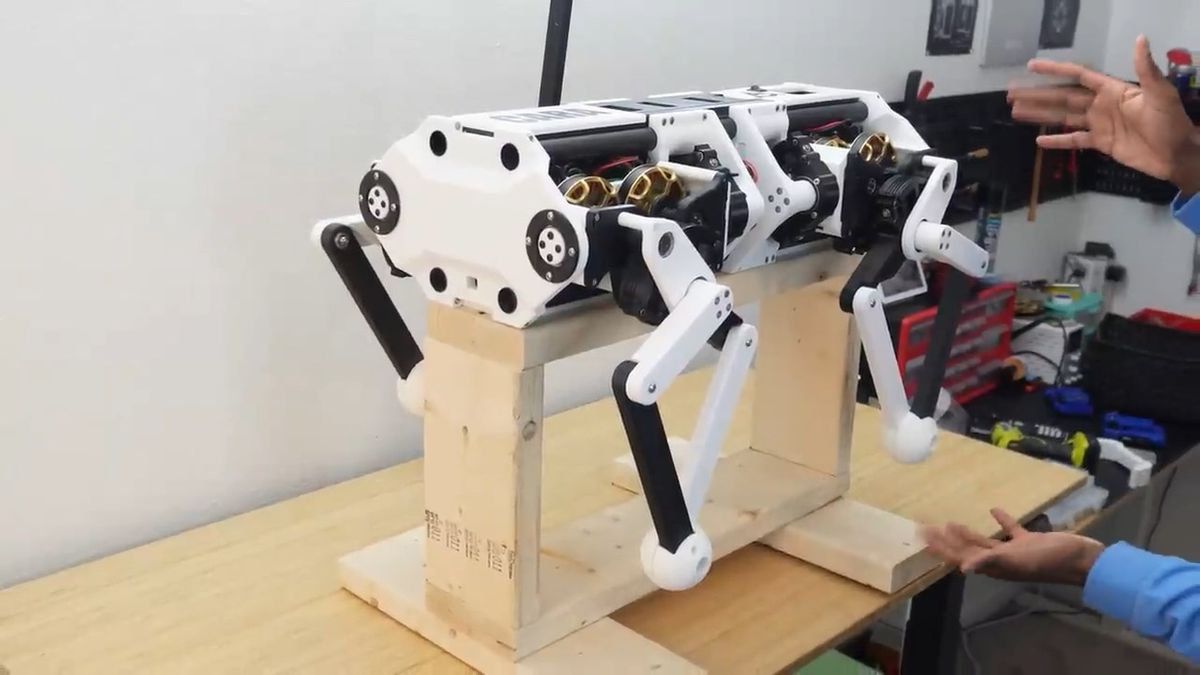
The robot dog's legs feature a five-bar leg design consisting of five bars.
The motor is an

The motor is controlled by

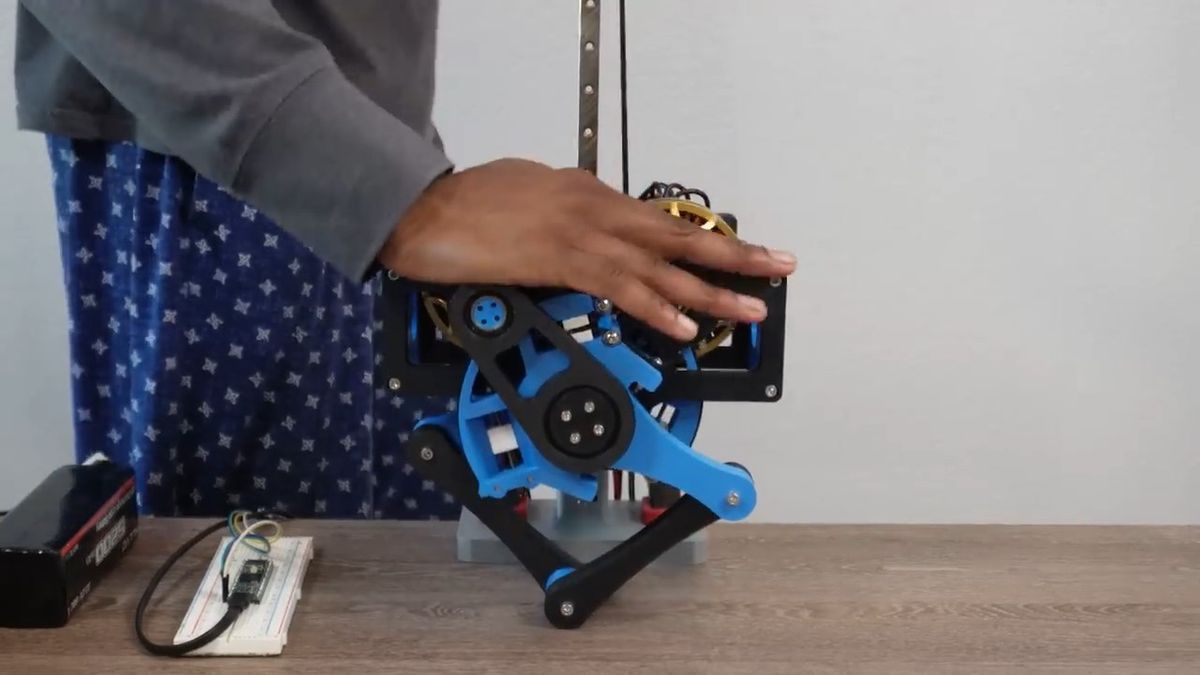
This completes the test robot leg.
We developed the control software, adjusting various control parameters, determining the optimal leg positions, and fine-tuning the leg movements and speed.
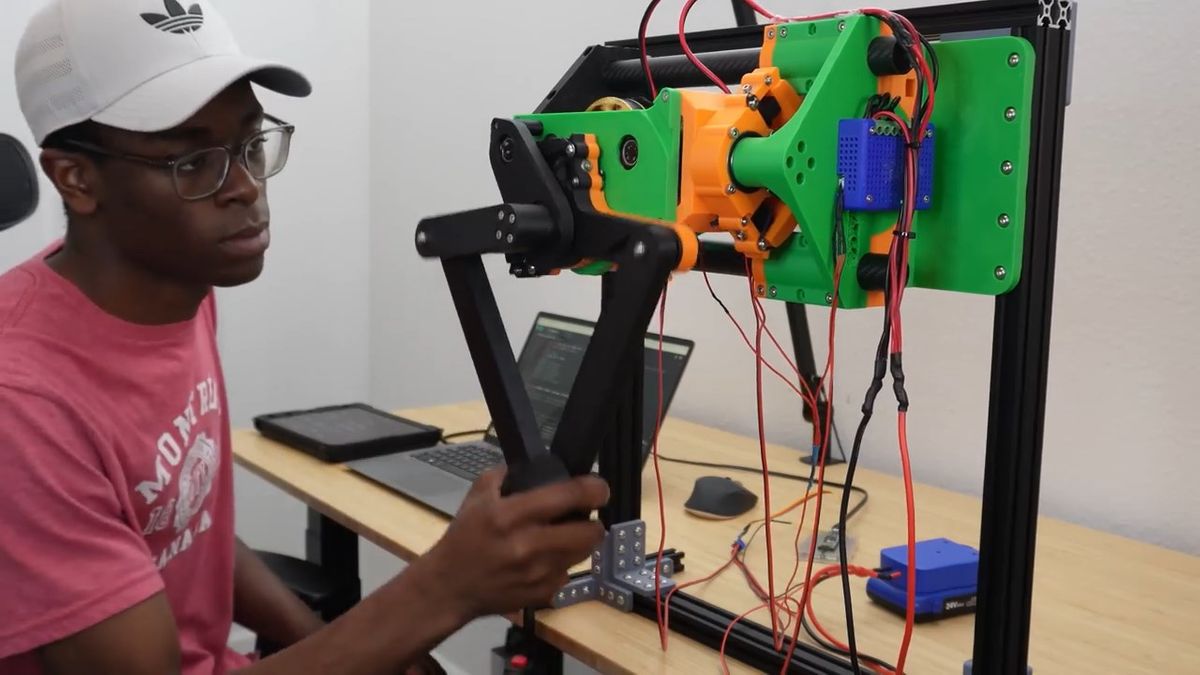
The brains behind CARA is

It is controlled using an RC remote control and receiver.

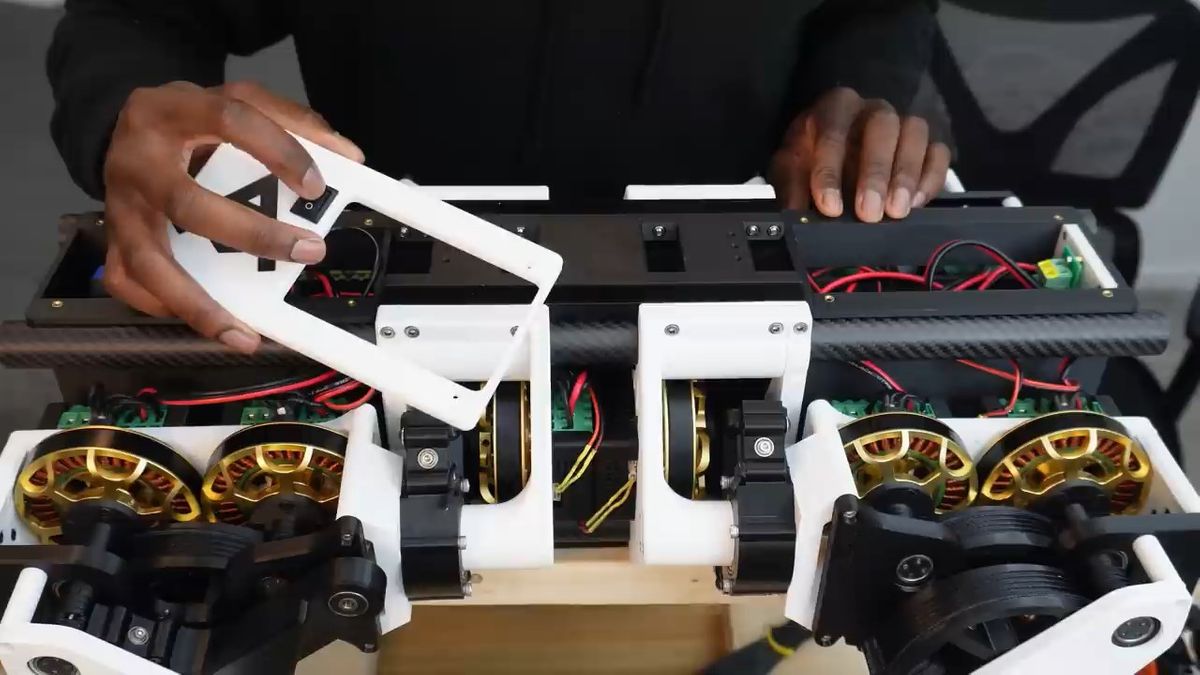
CARA's design is simple and easy to assemble and repair, and the reinforced front plate even includes eye-like parts.
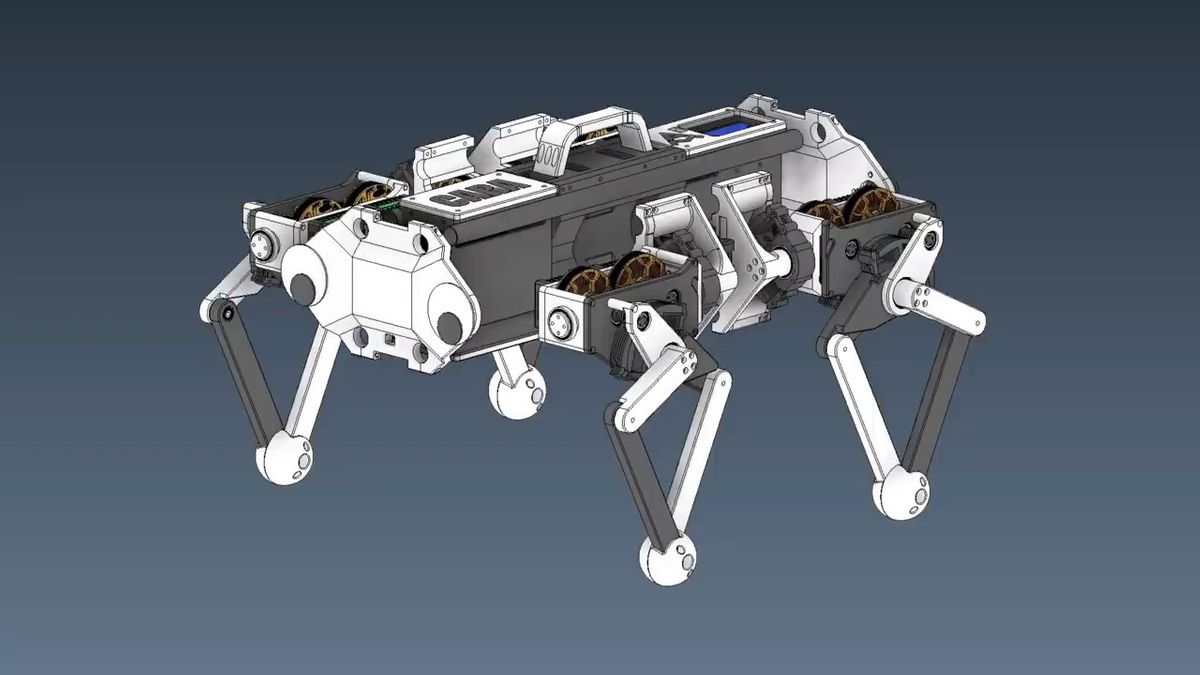
The rear handle and legs are made from
Once the parts are 3D printed, they are assembled.
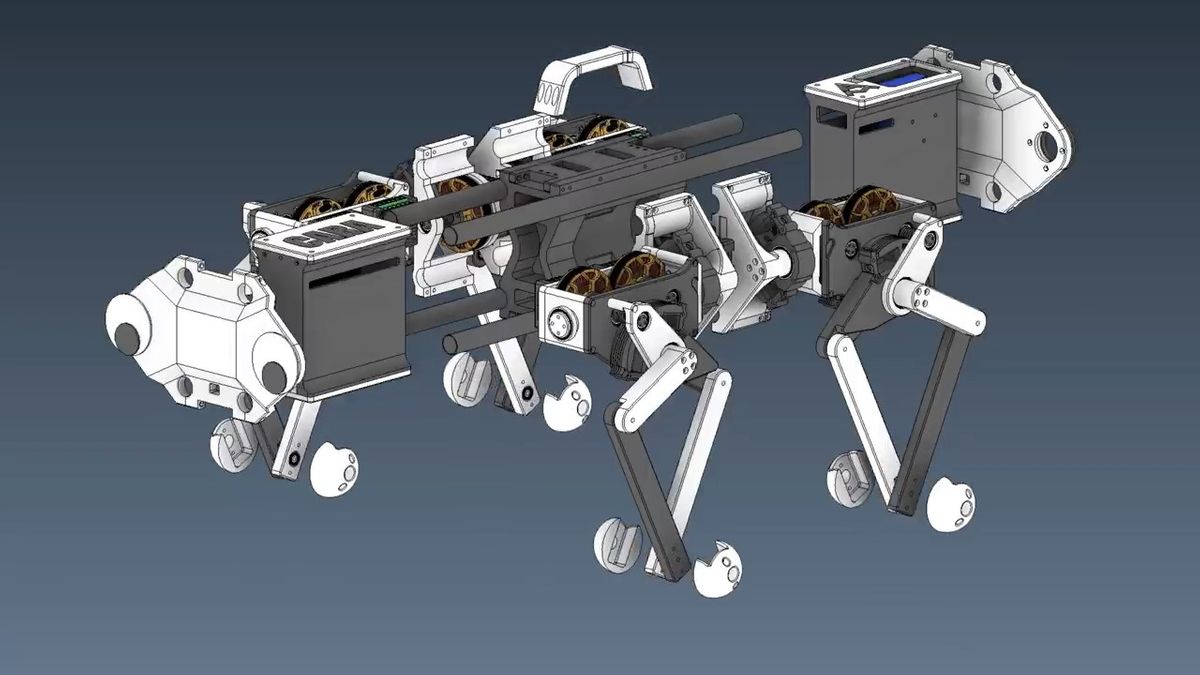
Gradually it started to look like a robot dog.

Assembly is complete.
Finally, we will program CARA.

CARA walks by moving diagonally opposite legs in unison, just like a quadruped animal.
Musa also paid special attention to the way the legs were raised when making corrections.

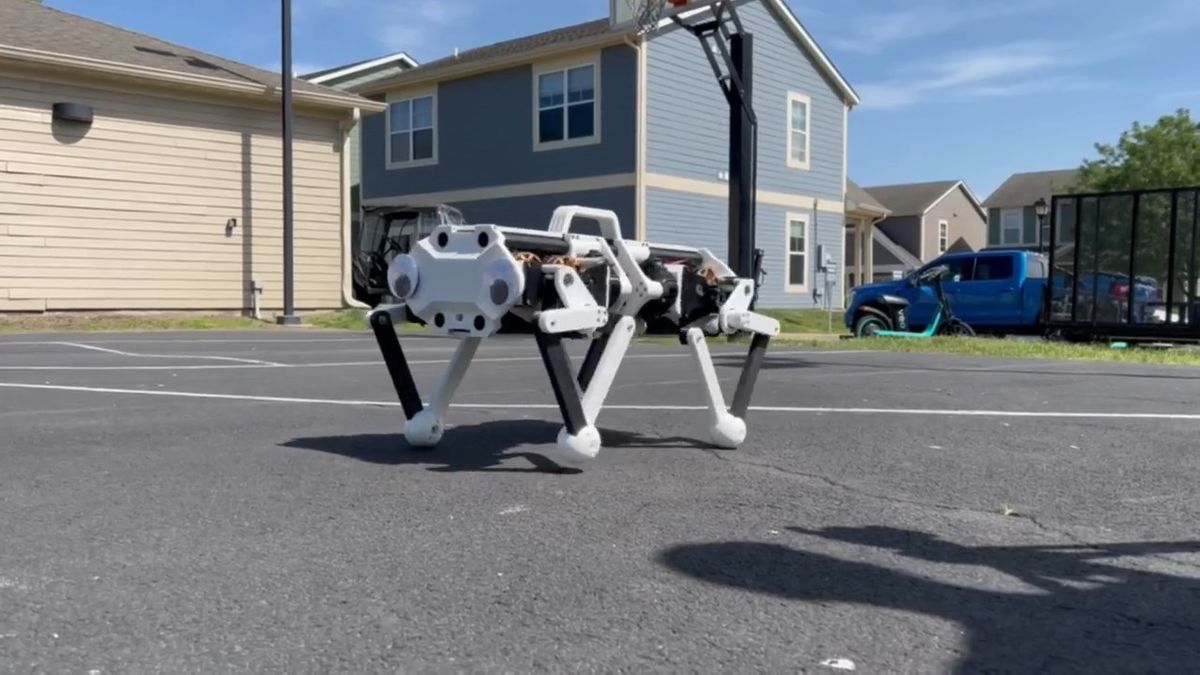
Finally, outdoor testing began.
CARA had been moving smoothly, but then it suddenly froze with a loud crack.

The legs were broken, so Musa improved their strength and also made modifications to reduce the strain on the legs by shortening the stride.

It also comes equipped with an inertial measurement unit, which allows CARA to detect rotation and tilt and maintain balance.

This required modifying the program to allow CARA to perform entirely new movements, which Musa says was 'definitely the most challenging part of the development.'

However, the excitement when CARA tilted smoothly was great. 'Seeing CARA tilt in place was the highlight of the project. The movement was so smooth, it felt like CARA had come to life,' said Musa.

And so CARA was finally completed.

It can move forward, backward, left and right, and rotate on the spot. It can also move sideways like a crab.

You can also jump on the spot.

You can also lean forward or twist your body around.


Even if you tilt the desk it is standing on, it balances well and won't fall over.

I tried kicking it maliciously with my legs but it didn't fall.

Musa plans to continue updating CARA and also plans to release a smaller version of CARA with design guides as open source.

Related Posts: