Introducing the ATMO robot, which can transform in mid-air and switch from flying to land mode

by Ioannis Mandralis/Communications Engineering
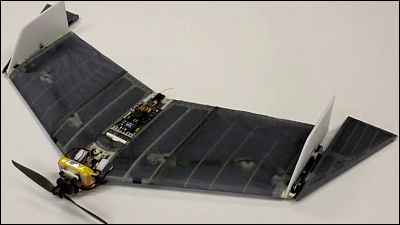
A team of engineers from the California Institute of Technology has unveiled the Aerial Transforming Morphobot (ATMO), a robot that can transform into a ground vehicle while flying.
ATMO: an aerially transforming morphobot for dynamic ground-aerial transition | Communications Engineering
Mid-Air Transformation Helps Flying, Rolling Robot to Transition Smoothly - www.caltech.edu
https://www.caltech.edu/about/news/mid-air-transformation-helps-flying-rolling-robot-to-transition-smoothly
You can see ATMO taking off and landing from below.
ATMO robot can transform in the air and move on the ground - YouTube
ATMO can smoothly transition from flight to vehicle and back.

by Ioannis Mandralis/Communications Engineering
ATMO's predecessor was the 'Multi-Modal Mobility Morphobot (M4),' developed by California Institute of Technology, inspired by the way animals use their bodies in different ways to achieve different modes of movement.
A transformer drone inspired by animals has arrived, capable of walking, running and flying with wheels that become propellers - GIGAZINE

The biggest difference between ATMO and the M4 is that, unlike the M4, which could only transition from flying to vehicle mode after landing, ATMO can now transform in mid-air. This allows ATMO to overcome the M4's weakness of not being good at handling rough terrain, making it possible to make emergency landings on slopes and transform into a vehicle while maintaining flight speed.
'When you watch a bird land and then run, it seems like a simple thing to do, but the aerospace industry has been working on this for probably 50 years or more,' said Morteza Gharib, a professor at the California Institute of Technology and co-author of the paper.
Particularly challenging was understanding the complex jet streams generated by the four rotors. To develop the aircraft's control algorithms, the team used a technique called 'load cell testing,' in which ATMO was attached to a robotic arm to measure changes in thrust, and also conducted visualization experiments using smoke and lasers to investigate the aerodynamic mechanisms involved in deformation.

by Ioannis Mandralis/Communications Engineering
In addition, by replacing the attitude control actuator with a single morphing mechanism, we were able to reduce the number of actuators from 12 to 1, simplifying the entire system and reducing the number of points of failure.

'The control algorithm is the biggest innovation in this paper,' said Ioannis Mandralis, lead author of the paper. 'The ATMO quadrotor uses a special control system for the thruster arrangement and the way it flies. This introduces a dynamic system that has not been studied before, and as soon as the robot starts to deform, there are different dynamic couplings - different forces that interact. And the control system has to be able to react quickly to all of this.'
The results of this research, which has made ATMO a more agile and robust robot, could have applications in commercial delivery systems and robotic exploration.
Mr. Ghalib (left) and Mr. Mandralis (right).

by Lance Hayashida/Caltech
Related Posts: